|
|
通信方案软件设计(环形动态申请内存发送,支持USART+IIC+SPI+CAN在内所有的协议,提供AVR+C8051F+LPC2000+STM32例程及仿真实例)
我已经移植好了AVR系列,STM32系列,c8051f系列和LPC2000系列的IIC、SPI、CAN(有些芯片没有)和USART总线的所有版本,现在比较忙,全部整理需要很多时间,稍后再穿上吧。
Mega16的USART(CVAVR版本)ourdev_682745DZPEC4.rar(文件大小:119K) (原文件名:Mega16的USART(CVAVR版本).rar)
Mega16的USART(ICCVAVR版本)ourdev_682746AK16GN.rar(文件大小:240K) (原文件名:Mega16的USART(ICCAVR版本).rar)
Mega128的USART(CVAVR版本)ourdev_682751ZM8EMV.rar(文件大小:119K) (原文件名:Mega128的USART(CVAVR版本).rar)
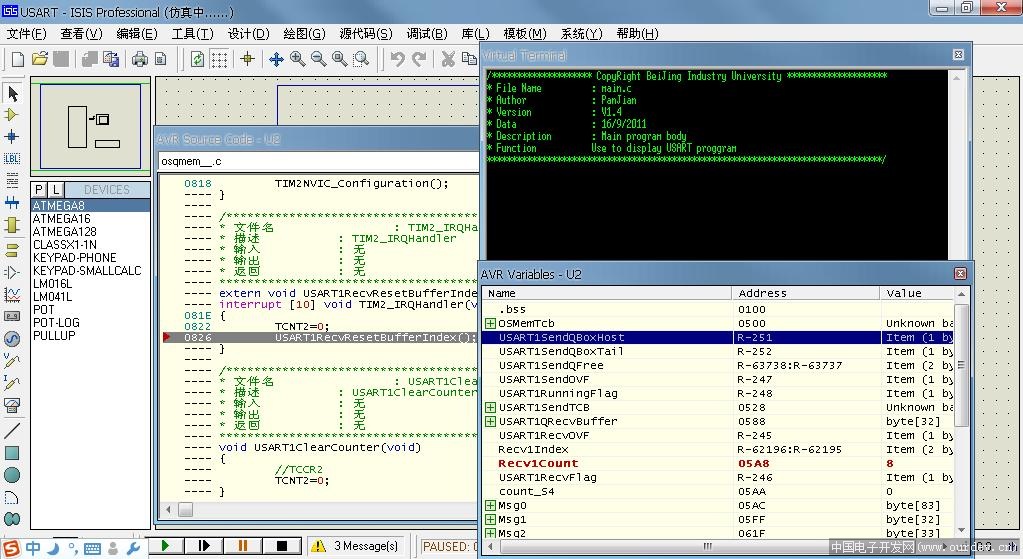
mega128仿真图片 (原文件名:Mega128.JPG)
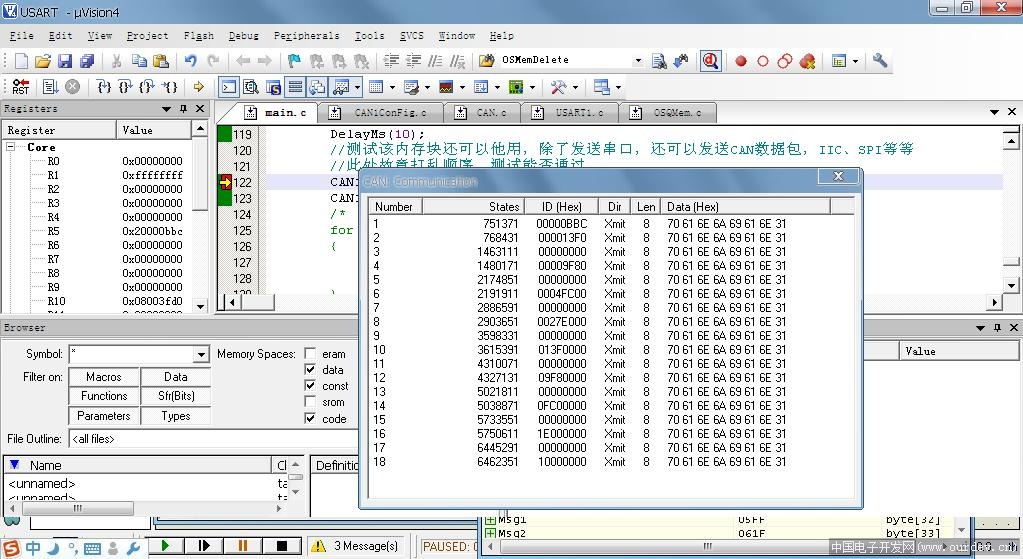
stm32的CAN总线与USART总线 (原文件名:STM32-CAN.JPG)
通信方案软件设计ourdev_682757JDMBNY.pdf(文件大小:299K) (原文件名:通信方案软件设计.pdf)
STM32F103的CAN总线ourdev_682758X9YMX7.rar(文件大小:193K) (原文件名:STM32F103的CAN总线.rar)
C8051F020ourdev_682759E5G4DV.rar(文件大小:59K) (原文件名:C8051F020.rar)
LPC2114ourdev_682760CBS2LU.rar(文件大小:282K) (原文件名:LPC2114.rar)
空的demo版本ourdev_682761NV8N5I.rar(文件大小:8K) (原文件名:demo.rar)
1 环形队列串口通信方式的回顾
1.1 接口函数简单的介绍
在前面《串口设备驱动接口》一章中(http://www.ourdev.cn/bbs/bbs_content.jsp?bbs_sn=4516795&bbs_page_no=1&bbs_id=3020 ),介绍了环形队列动态发送接收数据的好处,同时介绍了内存分配的相关内容,但是有些朋友,特别是初学者可以会比较晕,主要是不知道怎么用,以及为什么要这样设计,下文就是一些应用,我会提供很多典型微控制器的应用案例与工程源代码。但是希望朋友们知道怎么用了以后还是返回原文看看,知道原理以后,稍加修改,就可以使用到很多通讯接口和通信芯片上。
笔者也是发大宏愿,希望能在IIC、SPI、CAN中广泛使用这种通信方案,呵呵, 借用乔布斯的一句名言:我们来到这个世界是为了改变世界的,不然的话,我们为什么来到这里!
然而,现实总是残酷地,经过无数打击以后,我们接受了这个现状,自顶向下的腐_败、社会的全面溃败、高通胀、高房价、没有出路,我们的未来昏暗而渺茫,至少,我们有共同的爱好,也许在这里我们才能找到一些心灵上的慰藉。
1.1.1 demo工程包内的文件
我们先打开Demo文件夹,在这个文件夹里存放着源文件,所有的代码都在这里。
(1) OSQMem.c:内存分配的相关函数文件
(2) OSQMem.h:内存分配的配置头文件,这个文件非常重要,里面的参数直接设置运行必不可少的参数:
#define OS_MEM_MAX 8 //最多允许的内存块管理区
#define OS_MEM_USART1_MAX 1024 //发送缓冲区的内存大小
#define OS_MEM_USART1_BLK 32 //每一个块的长度
其中OS_MEM_MAX分配内存管理区的数量,前已述及,内存管理区内内存块的大小是必须能够修改的,所以在这里预留了8个管理区,例程中只使用了一个,主要是为以后升级方便。对于CAN总线包而言,应该设置成8个(CAN数据包最大为8个字节数据),而对于SPI存储设备而言,其实可以设置成512字节(Flash每一页大约是占512字节), 而对于IIC存储设备而言,有些每页16字节,有些8字节不等。
这里只使用了一个管理区,不过就如例程中演示的,不同的应用程序申请同一管理区的内存块是不会相互干扰的。
OS_MEM_USART1_MAX指内存缓冲区的大小,这个数值取决于于应用程序需求,我这里设置的是1024,对于8位机的AVR而言,设置应该适度减小。
OS_MEM_USART1_BLK指每一个块的长度,大小_参考《串口设备驱动接口 》一文。
USART1.h:USART1.c的头文件,包含了其所有函数的预定义。
USART1.c:里面有串口发送的所有函数,用户需要设置的参数有:
#define USART1_SEND_MAX_Q (OS_MEM_USART1_BLK-4) //发送内存块内的最大空间
#define USART1_SEND_MAX_BOX OS_MEM_USART1_MAX/OS_MEM_USART1_BLK
//发送内存块的最大数量
#define USART1_RECV_MAX_Q 32 //接收内存块内的最大空间
具体的含义不再详细介绍了,这里解释一下为什么每个发送块内有用的空间是OS_MEM_USART1_BLK-4,因为每个内存块中头四个字节已经存储了下一个链表的地址,是不能给用户使用的(对于8位机3个字节已经足够,具体依赖于硬件)。
(5) USART1ConFig.c
这个函数与底层相关,如果实例库中没有需要用户自己移植,不过很简单,和你们自己写驱动函数一样,你们只需实现简单的几个设置、发送、接收函数,就可以方便的使用这个功能比较强大的通信方案,换句话说,你们自己写底层驱动,这个过程也是必须的,何不试试呢~~保证你会有意外惊喜。
1.1.2 使用配置
以下几个参数是每次使用项目前根据需求必须配置的。
#define OS_MEM_USART1_MAX 1024 //发送缓冲区的内存大小
#define OS_MEM_USART1_BLK 32 //每一个块的长度
#define USART1_SEND_MAX_Q (OS_MEM_USART1_BLK-4) //发送内存块内的最大空间
#define USART1_SEND_MAX_BOX OS_MEM_USART1_MAX/OS_MEM_USART1_BLK
//发送内存块的最大数量
#define USART1_RECV_MAX_Q 32 //接收内存块内的最大空间
1.2 使用介绍
首先建立工程,配置好路径参数什么的,然后添加移植好了的工程,编译通过以后,再加入demo内的除了main.c之外的源文件。
(2)在OSQMem.h中设置以下参数:
#define OS_MEM_MAX 8 //最多允许的内存块管理区
#define OS_MEM_USART1_MAX 1024 //发送缓冲区的内存大小
#define OS_MEM_USART1_BLK 32 //每一个块的长度
这些参数与内存管理相关,具体的各位看源代码吧,这些东西不是什么高难度的东西,各位都应该能够看懂,不懂的可以给我发邮件。
(3)USART1.c:里面有串口发送的所有函数,用户需要设置的参数有:
#define USART1_SEND_MAX_Q (OS_MEM_USART1_BLK-4) //发送内存块内的最大空间
#define USART1_SEND_MAX_BOX OS_MEM_USART1_MAX/OS_MEM_USART1_BLK
//发送内存块的最大数量
#define USART1_RECV_MAX_Q 32 //接收内存块内的最大空间
到这里配置就结束了,如果编译可以通过,就可以进入下一步了。
定义内存缓冲区,和一些运行相关的变量,建立内存管理区,参数的含义见注释,函数会返回一个内存管理区指针,以后申请内存全部是通过它来完成,然后配置串口等等,串口函数的参数是波特率,这个功能我还没有使用,仅仅是把stm32的配置加进去了,其他的微处理器我不熟,没有时间去深究,波特率还需要你们自己去查手册。
char MemUSART1TestBuf[OS_MEM_USART1_MAX]; //空白缓冲区地址,用于建立内存块
OSMEMTcb *OSQUSART1Index; //内存块管理区指针
char MemTestErr; //指示错误用的,非0时错误
//在内存管理区注_册,返回一个内存管理区指针,这个指针很重要,申请内存全部需要它完成
// 空白缓冲区地址,用于建立内存块
// | 每一个内存块的长度
// | | 共有多少个内存块
// | | | 错误标志
// | | | |
OSQUSART1Index=(OSMEMTcb | | | | *)OSMemCreate(MemUSART1TestBuf,OS_MEM_USART1_BLK,OS_MEM_USART1_MAX/OS_MEM_USART1_BLK,&MemTestErr);
//初始化串口端口,波特率为115200,目前只针对stm32有用,其他的硬件需要查手册去完成配置
USART1_Configuration(115200);
接下来就是怎么发送和接收数据了,提供了两种发送方法,一个是USART1DispFun()函数,这个函数通过指针传递参数,一遇到0x00就截止了:
/*******************************************************************************
* 文件名 : USART1DispFun
* 描述 : 检查发送缓冲区的大小,若空间足够,将待发送的数据放入到发送缓冲
区中去,并且启动发送,与USART1WriteDataToBuffer不同的是,启动发送
函数时不需要指定文件大小的,这就给调用提供了方便.
* 输入 : buffer待发送的数据的指针
* 输出 : 无
* 返回 : 若正确放入到发送缓冲区中去了,就返回0x00,否则返回0x01
*******************************************************************************/
unsigned char USART1DispFun(unsigned char *buffer)
一个是USART1WriteDataToBuffer()函数,这个函数可以发送带0x00数据,但须指定待发送字节数量:
/*******************************************************************************
* 文件名 : USART1WriteDataToBuffer
* 描述 : 检查发送缓冲区的大小,若空间足够,将待发送的数据放入到发送缓冲
区中去,并且启动发送
* 输入 : buffer待发送的数据的指针,count待发送的数据的数量
* 输出 : 无
* 返回 : 若正确放入到发送缓冲区中去了,就返回0x00 ,否则返回0x01
*******************************************************************************/
unsigned char USART1WriteDataToBuffer(unsigned char *buffer,unsigned int count)
同样,接收数据的方法也有两种,马潮老师在《AVR微控制器与嵌入式系统》一书中介绍了基于状态机的方法,这种方法对接收时间没有要求,只要数据传送正确就可以了。这种接收数据的方式需要指定一帧数据的大小,只需调用函数USART1RecvData(countt,0),count只数据帧的大小,后面代表不会启动超时中断。
/*******************************************************************************
* 文件名 : USART1RecvData
* 描述 : 当接收到完整的一帧数据以后的处理函数
* 输入 : count:要接收到的一帧数据数据的个数,flag:1开启超时中断
0关闭超时中断
* 输出 : 无
* 返回 : 无
*******************************************************************************/
unsigned char USART1RecvData(unsigned int count,unsigned char flag)
接收数据包后,在USART1.c文件中的USART1RecvResetBufferIndex()函数中处理数据,朋友们在此函数中写应用函数,但是不要把该函数中的任何数据删除,只需在函数的最后一行加上你自己的代码就可以了。其实我最初的想法是在固定的设置每一个帧的大小,但是在项目的过程中,遇到了很多串口线上设备没有固定的大小,有时需要传送一些数据流,有时是指令,这样我们怎么判定一帧已经结束了呢,就是超时中断。 这就相当于一个看门狗程序,启动串口定时定时器以后,譬如在9600波特率下(此时发送一个字节的数据需要1.014ms),每隔2ms中断一次,如果在这2ms内收到了串口数据,将串口定时定时器内的计数器变为0,重新计数,如此循环,直到最后一个字节时,不再有程序将计数器变为0,定时器将会发生中断,这时一帧数据就结束了。可以对该命令或者数据进行处理了。 同样,接收数据包后,在USART1.c文件中的USART1RecvResetBufferIndex()函数中处理数据,
(6)申请和释放内存函数OSMemGet()、OSMemDelete()。
/*******************************************************************************
* 文件名 : OSMemGet
* 描述 : 从一个内存管理区获取一个内存块
* 移植步骤 : 无
* 输入 : ptr内存管理区的指针
* 输出 : 无
* 返回 : 获取的空白内存块的首地址
*******************************************************************************/
u8 *OSMemGet(OSMEMTcb *ptr,u8 *err)
/*******************************************************************************
* 文件名 : OSMemDelete
* 描述 : 从一个内存管理区删除一个内存块
* 移植步骤 : 无
* 输入 : ptr内存管理区的指针,index,申请到的内存块的指针
* 输出 : 无
* 返回 : 如果要删除的内存块是一个空指针,则返回0xff,若能够删除,返回0
*******************************************************************************/
u8 OSMemDelete(OSMEMTcb *ptr,u8 *index)
2 通信数据块结构与内存管理模块
2.1 为何要在缓冲区中建立通信数据块,以及加入内存管理模块
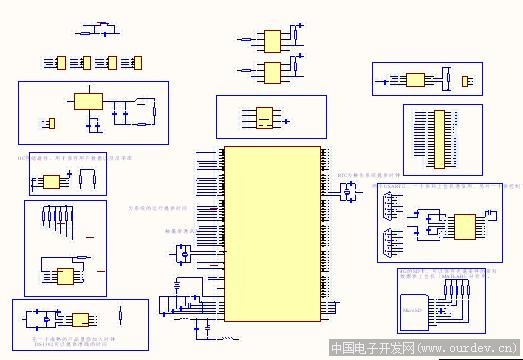
在嵌入式系统中,很多外围设备的速度是比较慢的,譬如串口和IIC设备,这些设备的输出输入的速度大约在数十微秒到数百微秒。在较复杂的应用中,例如在笔者的一个控制器的项目中,开机后主设备必须检测从设备的枚举情况,其流程图如下:
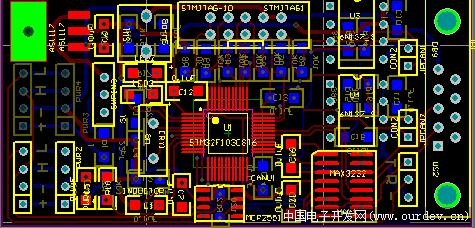
通讯使用的是232总线,经过我自己画的一块小板来完成232—CAN的转换。在网络中存在着60个从设备,对应不同的数据帧(具体的指令不详述),每一个设备的枚举要通过发送一帧指令,经过CAN转换,到达从设备,从设备响应以后返回给主设备。在这里计算一下,如果是在9600波特率的情况下,每个帧发送大约需要10ms的时间,加上返回的时间大约是20ms,那么60个设备大约需要1200ms,如果不使用操作系统,同时使用传统的等待方式发送,这1200ms微控制器什么也做不了,这在学校、研究所、“教授”、“专家”们那里糊弄糊弄还行,到了社会上,就不能这么干了。
以下是我使用环形队列发送一个欢迎界面的(一共374个字符)所耗费的时间,使用MDK4.02的性能分析器进行分析:可见在发送的大部分时间中,CPU实际上都是在睡大觉(35ms在DelayMs函数中),只有大约不到2ms的时间是在做事情,如果加上笔者曾经所写的合作式操作系统的方式(见笔者的另外一篇帖子http://www.ourdev.cn/bbs/bbs_content.jsp?bbs_sn=3719375&bbs_page_no=1&search_mode=3&search_text=linquan315&bbs_id=9999 ),CPU同时还可以做很多其他的事情。
当然使用RT-thread或者UCOS那就更加锦上添花了。
图2-1 主控制器枚举从设备
图2-2 使用MDK4.02的性能分析器分析各个函数的使用情况
2.2 内存管理模块的申请、释放内存测试
测试方法如下,
(1)首先定义相关变量,建立内存管理区,各个参数的定义见注释。
char MemUSART1TestBuf[OS_MEM_USART1_MAX]; //空白缓冲区地址,用于建立内存块
OSMEMTcb *OSQUSART1Index; //内存块管理区指针
char *MemTestIndex[10]; //分配到了的内存块的指针,测试用的
//在这里观察分配的内存块的地址,若
//是出现了异常,证明出现了错误
char MemTestErr; //指示错误用的,非0时错误
值得注意的是为了便于观察内存分配情况,在这里定义了一个指针数组*MemTestIndex[10],用于观察分配的内存块的地址,若是出现了异常,证明出现了错误。
//在内存管理区注_册,返回一个内存管理区指针,这个指针很重要,申请内存全部需要它完成
// 空白缓冲区地址,用于建立内存块
// | 每一个内存块的长度
// | | 共有多少个内存块
// | | | 错误标志
// | | | |
OSQUSART1Index=(OSMEMTcb | | | | *)OSMemCreate(MemUSART1TestBuf,OS_MEM_USART1_BLK,OS_MEM_USART1_MAX/OS_MEM_USART1_BLK,&MemTestErr);
//初始化串口端口,波特率为115200,目前只针对stm32有用,其他的硬件需要查手册去完成配置
USART1_Configuration(115200);
//显示欢迎界面
Welcome();
DelayMs(100);
————————————
————————————
(2)在超级循环中不断申请、释放内存,同时启动串口发送。由于串口发送的同时也在不停的申请和释放内存块,两者交替进行,为了最大层度的仿真实际情况,申请和释放内存的顺序被人为的打乱,不同的应用程序同时申请一个管理区的内存,经过测试,没有发现异常。
While(1)
{
//测试该内存块还可以他用,除了发送串口,还可以发送CAN数据包,IIC、SPI等等
for(i=0;i<10;i++)
{
//申请内存
MemTestIndex=(u8 *)OSMemGet(OSQUSART1Index,&MemTestErr);
}
//发送数据
USART1WriteDataToBuffer(&count,1);count++;
DelayMs(2);
//测试该内存块还可以他用,除了发送串口,还可以发送CAN数据包,IIC、SPI等等
//此处故意打乱顺序,测试能否通过
for(i=10;i>0;i--)
{
//释放内存
OSMemDelete(OSQUSART1Index,MemTestIndex[i-1]);
}
}
图 2-3 内存块测试
3 移植要点以及范例
3.1 移植步骤与注意事项
移植其实很简单,当然,前提是你对这个器件有足够的了解,我发觉这个过程其实比较痛苦,我没有用过AT91SRAM64、LPC2148、LM3S1138等芯片,但是想将其移植,苦于没有代码库或者例程,要完整的搭建一个工程其实是比较困难的,至少需要一段时间,但是我没有足够的时间。仅仅完成了LPC的移植,LPC的寄存器比较简单。或者说大家都是极其自私的人,总是盼望别人来拯救自己(笔者不喜欢那些经常在网上求救的帖子,相信很多人也不喜欢,每个人遇到的问题千差万别,需要自己去解决,工作了以后,有问题谁鸟你),自己学了点东西就捂着,别人做出了东西就希望人家免费的教你,还把原理图、源代码、PCB都供上。我在网上找了许久都没有找到合适的简单的串口收发例程,使我十分生气。
这些工作后来我也不想移植了,如果朋友们有简单的串口、IIC、SPI、CAN的例程包及仿真软件,不妨发给我,我帮你们移植,不然看一堆数据手册和编译环境从头到尾,我没那个耐心(ST的除外,我对ST非常熟悉)。
废话少说,首先需要的外设是:
通讯接口,可以是串口(232或者485),SPI、IIC、CAN,以太网和USB我不熟悉。我们需要提供配置代码、接收及发送代码、中断接口代码。
一个通用定时器,用来检测帧超时。我们需要配置代码、开始计数代码、结束计数代码、清零计数器代码。
3.1.1通讯接口的移植
如图3-1所示,需要配置如下函数。
图 3-1 需要移植的函数
在USAR1Config.c中,其他的函数不是非常重要,仅仅供以后的程序升级之用。
3.2 在51内核系列的C8051F020上的移植范例与MKD仿真
以下开始介绍C8051F020的移植范例。在C8051F020中使用的是传统的8051的内核,我在移植时发觉当加入内存分配的时候,就会出现程序跑飞的情况,经过仿真后,在内存释放的时候总是出现程序跳转异常,感觉是51的寄存器不适合比较复杂的指针运算以及函数嵌套,在将优化登记调至最低后,还是出现问题,笔者不得不放弃了内存分配的方法,与此同时将函数的块发送也取消了。
(1)USART1PinConfiguration函数
void USART1PinConfiguration(void)
{//交叉开关配置
XBR0 = 0x04;
XBR1 = 0x00;
XBR2 = 0x40;
// P0 口分配状况
// P0.0 = UART0 TX
// P0.1 = UART0 RX
//输出方式
P74OUT = 0x08;
}
(2)USART1NVIC_Configuration函数,由于C8051f020不需通道配置,这里仅仅简单的打开USART中断允许寄存器。有些微处理器没有发送完毕中断使能,而仅仅只有发送寄存器空的中断(特别是SPI通信中,很多处理器没有提供发送数据完成的中断),这时情况有些变化,不能在这里就使能了该中断,需要在发送开始的时候再使能,发送结束以后关闭这个中断。
void USART1NVIC_Configuration(void)
{
IE|=0x90;
}
USART1_Configuration函数,配置波特率,发送接收模式等函数。必须使能发送和接收,
USART1_Configuration
{
USART1PinConfiguration();
TMOD &= 0x0f;//选择T1工作模式
TMOD |= 0x20;
SCON0 = 0x50;
TH1 = 256 - 48000000 / 9600 / 32 / 12;
TR1 = 1;
USART1NVIC_Configuration();
}
(4)USART1发送函数
void USART1SendByte(unsigned char temp)
{
SBUF0=temp;
}
(5)USART的接收函数
unsigned int USART1RecvByte(void)
{
return SBUF0;
}
(6)USART的中断函数,在有些微处理器中,发送后中断通道与接收的通道不同,有些在同一个通道中,但是,这个函数的主要作用是,如果是发送中断,就必须调用USARTSendUpdate函数,如果是接受中断,就必须调用USARTRecvUpdate函数,至于清除中断标志等等代码,诸位应该知道,不再累述了。
void USART1_IRQHandler(void) interrupt 4 using 1
{
if(TI0)
{
USART1SendUpdate();
TI0=0;
}
else if(RI0)
{
USART1RecvUpdate();
RI0=0;
}
}
(7)TIM2_Configuration函数,用于产生超时中断,配置的时候要注意,定时器的时间是不能定的太长,也不能太短,大约是接收一个字符的2倍时间左右,至于定时器怎么配置和怎么分频各位自己去看手册,这里不再累述。
void TIM2_Configuration(void)
{
TMOD|=0x01; //定时器016位模式
CKCON|= 0x08; //定时器0使用系统时钟
TIM2NVIC_Configuration();
}
(8)TIM2NVIC_Configuration函数,用于配置中断。
void TIM2_IRQHandler(void) interrupt 1
{
ET0|=0x02; //允许TIM0中断
}
(9)TIM2_IRQHandler配置检测通信帧超时的定时器的中断通道,此时需要关闭定时器,以及调用USART1RecvResetBufferIndex函数,这个函数是收到一帧数据以后的处理函数。上次一些朋友说不知道怎么接收数据,这里就是。
void TIM2_IRQHandler(void) interrupt 1
{
TCON&=~0x20;
USART1RecvResetBufferIndex();
}
(10)USART1ClearCounter函数,清零定时器的值
void USART1ClearCounter(void)
{
TL0=0;
TH0=0;
}
(11)USART1StartCounter函数,定时器开始计时
void USART1StartCounter(void)
{
TCON|=0x10; //打开TIM0
}
(12)USART1StartCounter函数,定时器开停止始计时
void USART1StopCounter(void)
{
TCON&=~0x10; //关闭TIM0
}
以下是正在写的内容。
3.3 在8位AVR系列的Mega16、Mega128上的移植范例与Proteus仿真
3.3 在ARM7TDMI内核的NXP系列的LPC2148上的移植范例与MKD仿真
3.4 在Cortex-M3内核的STM32F系列的STM32F103ZET6上的移植范例
4 代码性能分析
4.1 使用MDK4.02的性能分析器进行分析
4.2 死区时间测试与可重入性分析
5 移植到SPI、IIC、CAN接口上
5.1 移植到STM32F103ZET6上,驱动SPI存储器芯片AT45DB161上
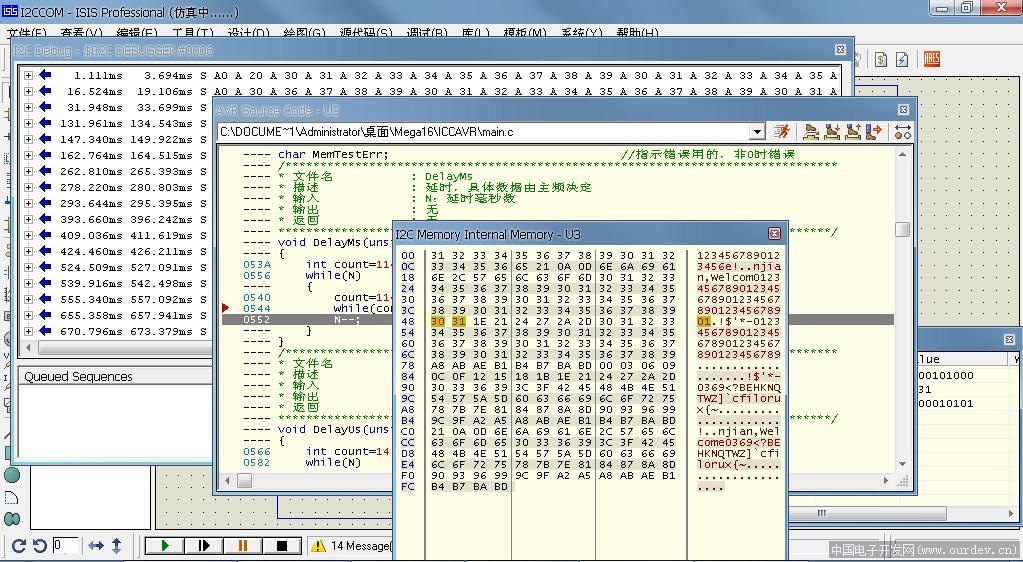
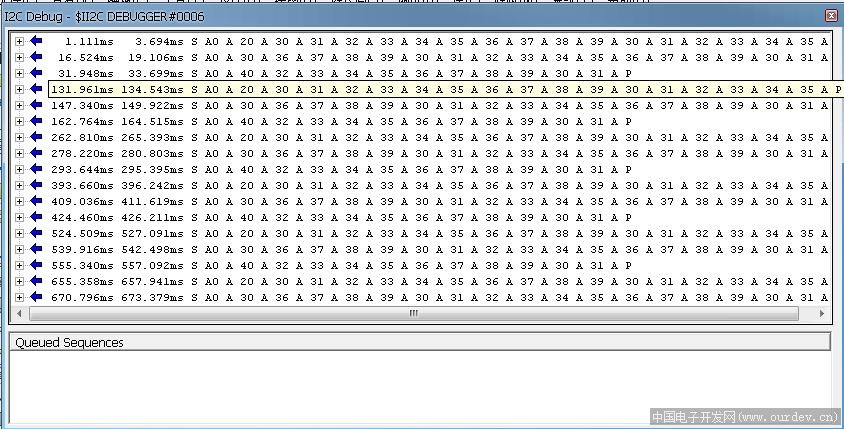
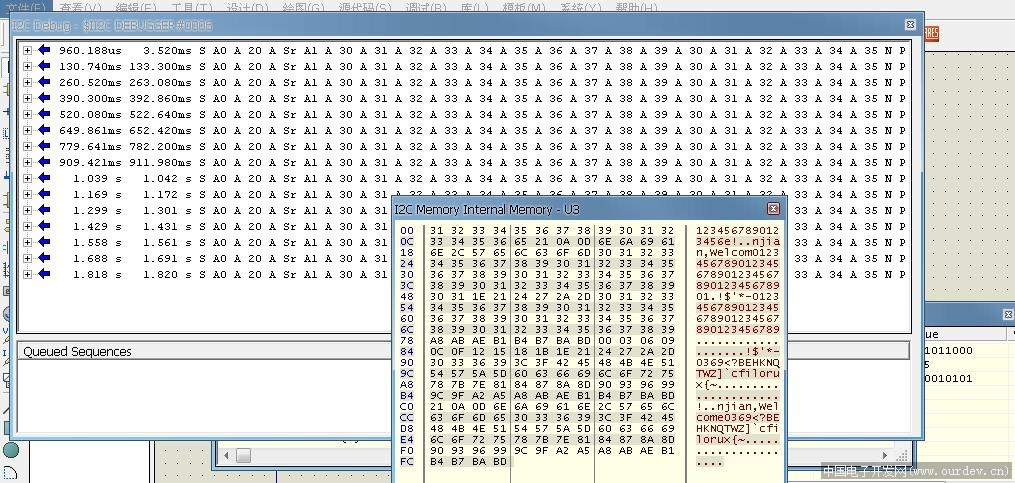
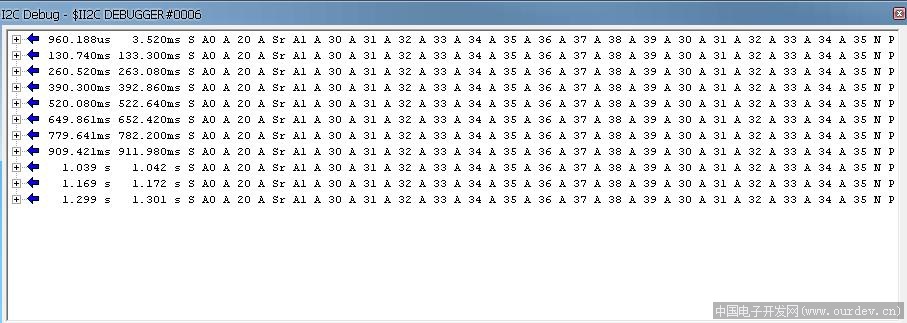
5.2 移植到STM32F103ZET6上,使用IIC总线,软件仿真
5.3 移植到STM32F103ZET6上,使用CAN总线,软件仿真 |
|
 [复制链接]
[复制链接]


 发表于 2011-10-7 09:46:32
发表于 2011-10-7 09:46:32
 楼主
楼主


 发表于 2011-11-6 09:49:12
发表于 2011-11-6 09:49:12