|
|

楼主 |
发表于 2011-2-18 13:01:05
|
显示全部楼层
我的QQ是273784187 不过很少在线,我的信箱是idfood@163.com也很少上。如果有什么要帮忙的 在这发个贴子我每天都会看的!!!
这几天重新研究了以上架购,存在如下问题:
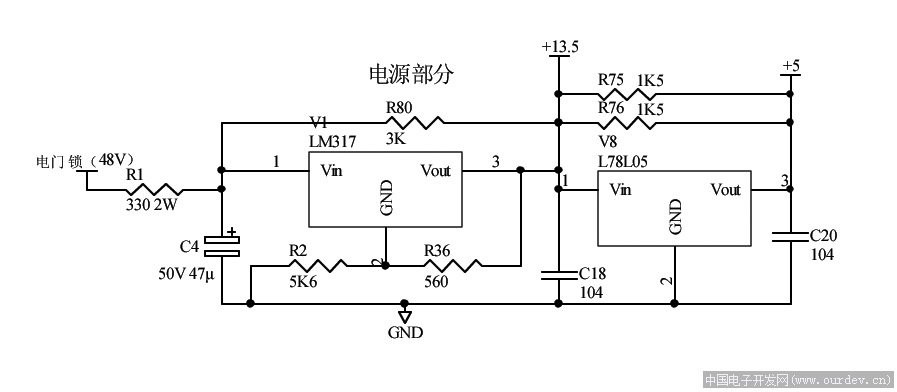
1、首先供电电路乱,多电源供电造成很大的问题隐患,同时也不便于以后实用充电,现已改进电路 将由一块24V20A铅酸电池供电。 经电路稳压出15V , 5V。
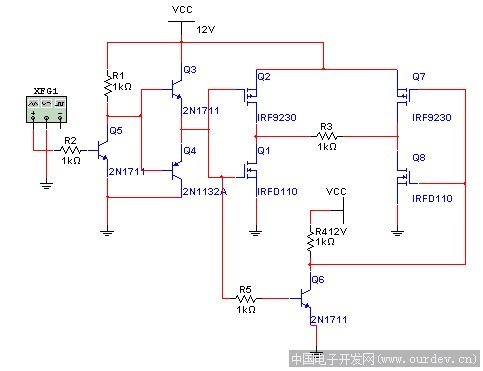
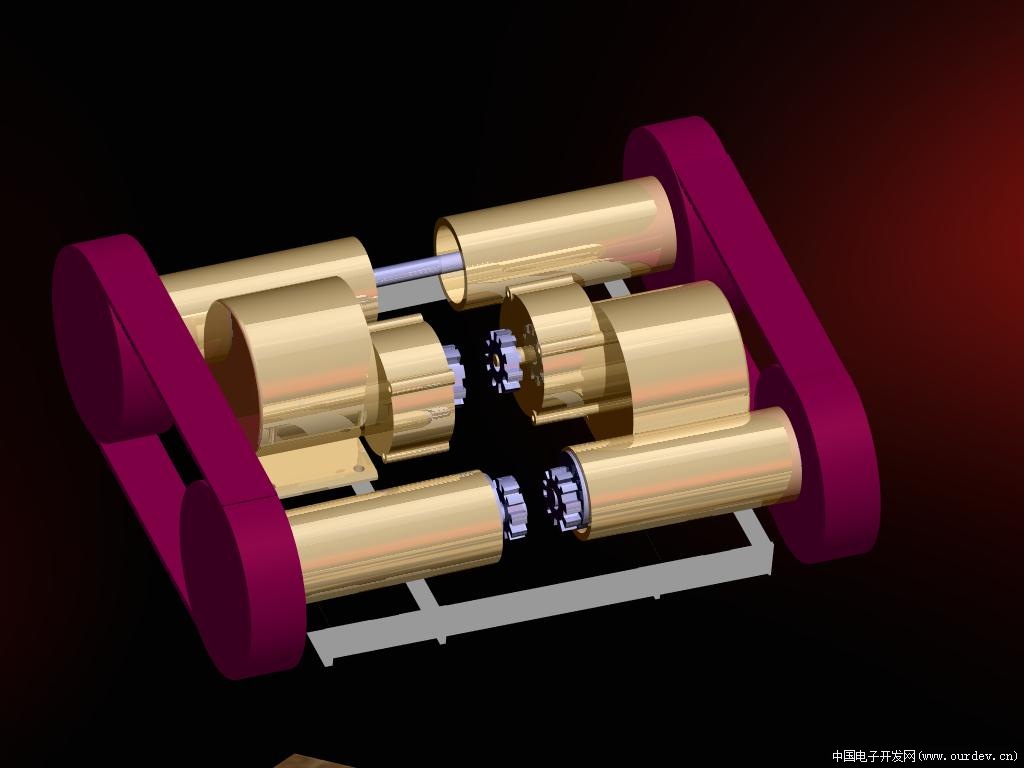
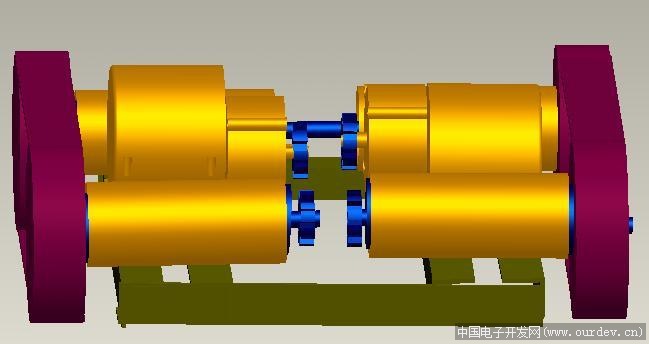
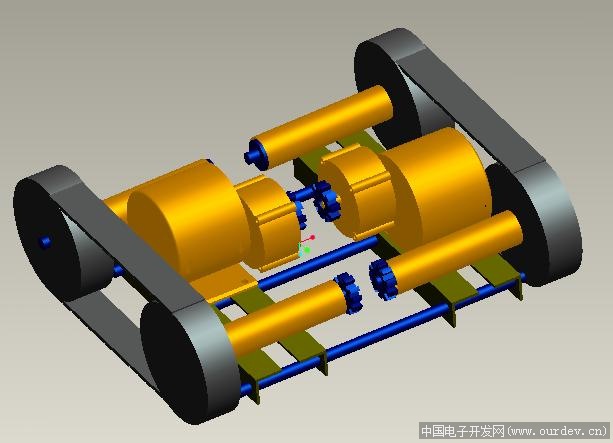
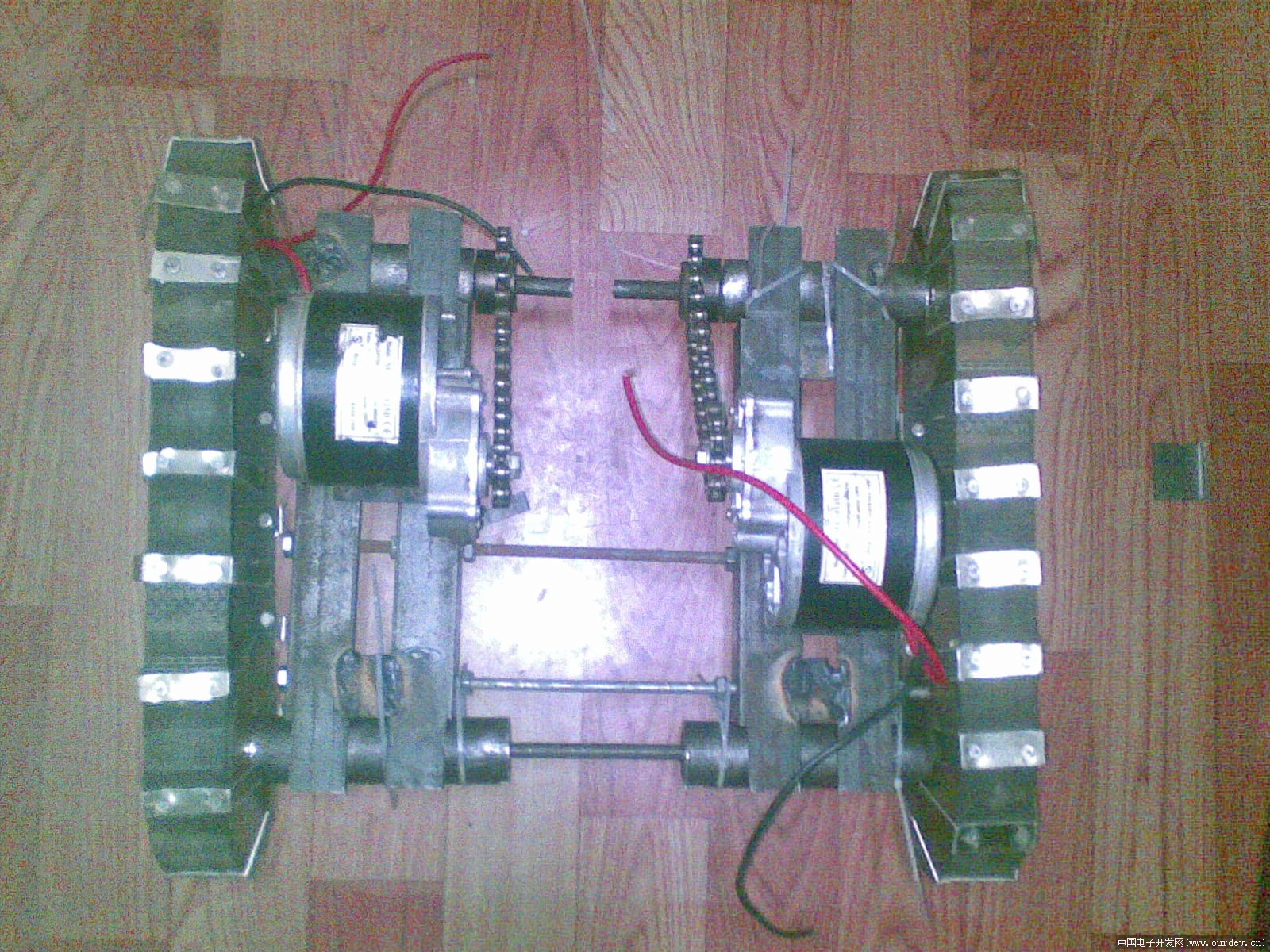
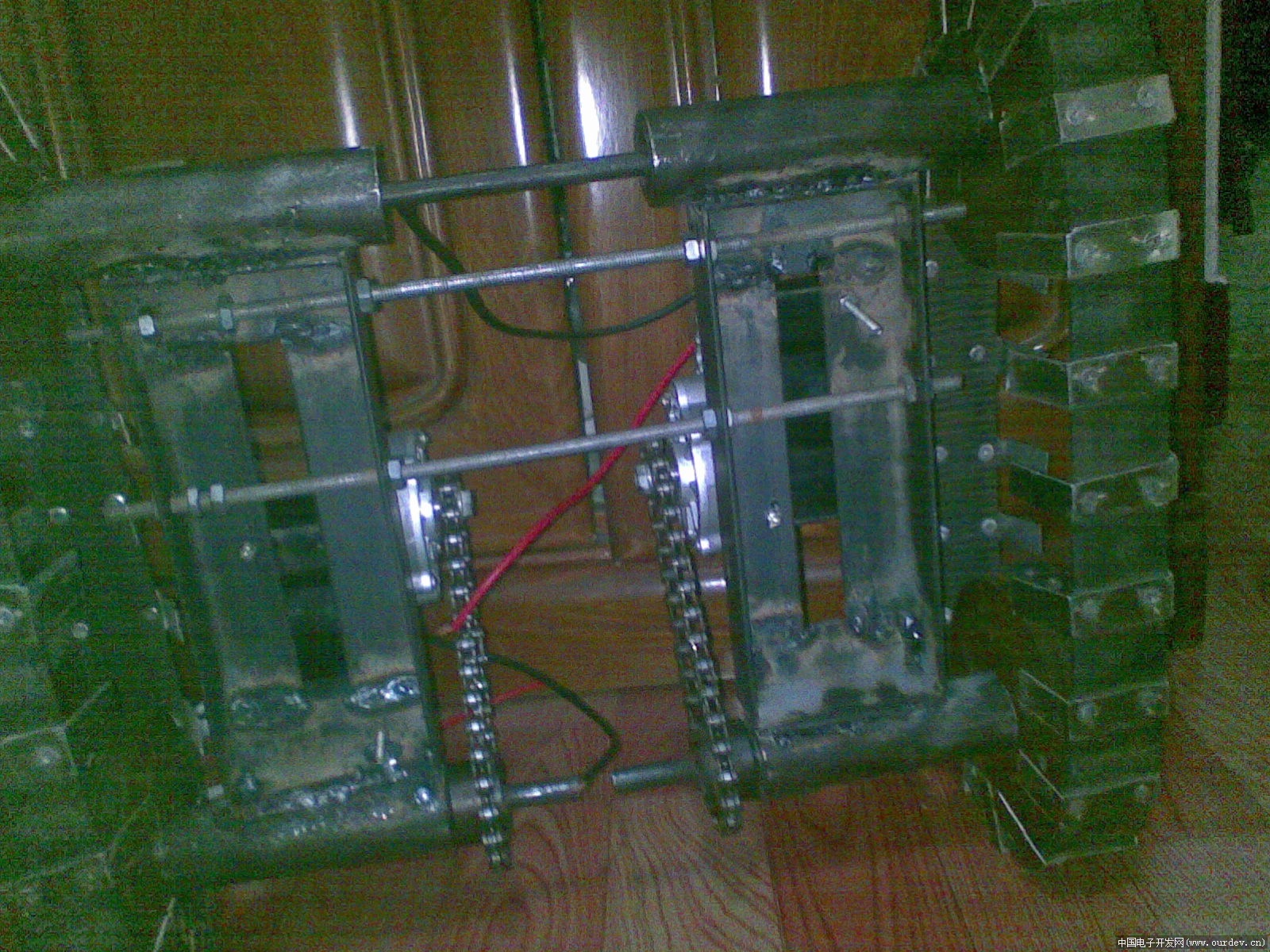
2、基本驱动系统过于复杂,可靠性差,实验中齿轮链条结构 时有掉链子的情况出现。以后改为直接在电机上加轴连器+滚动轴承+轮,的结构,望可靠性进一步提高。
3、如果改为它用,比如小区巡逻,建议将电机换为无刷电机同时采用轮式结构,这样更加节能,结构更加简单,可靠性更好,并且彻底杜绝跑飞现象。
缺点是电路及控制更加复杂。
其它方面:
1、下位机可以改用 C编写,以利于以后程序共享,上位机在VC程序原有基础上进一步的加入OPENCV支持,利于以后智能发展。
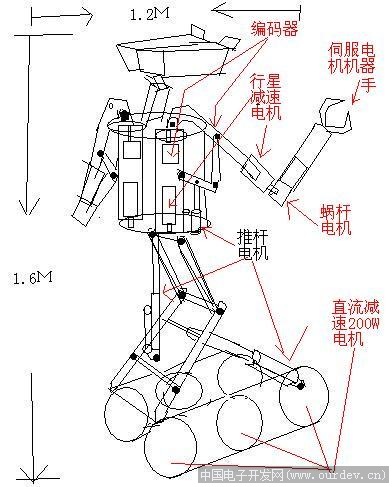
2、传感器方面,增加手部压力传感器,增加位置传感器(伺服电上可改为简单的位置传感器,将可变电阻的输出线引出),增加方位传感器(指南针传感器、GPS等)
3、增加上身升降系统,能调节身高这是机器人增加活动范围的重要指标。(现在可以通过两个推杆电机实现)
4、底盘牢固可靠度,原先的角铁太软,对于这么大(总重约40KG)的机器人应当用3*3角铁+12MM钢筋等,这样应该会好多拉(具体结构正在设计中,设计软件proe)
|
|


 发表于 2011-2-19 09:40:11
发表于 2011-2-19 09:40:11