|
|

楼主 |
发表于 2007-6-21 13:11:55
|
显示全部楼层
/******************************************************************************
* fhl.c - 编译环境AVRGCC
*
* Copyright 1998-2003 Routon Technology Co.,Ltd.
*
* DESCRIPTION: -
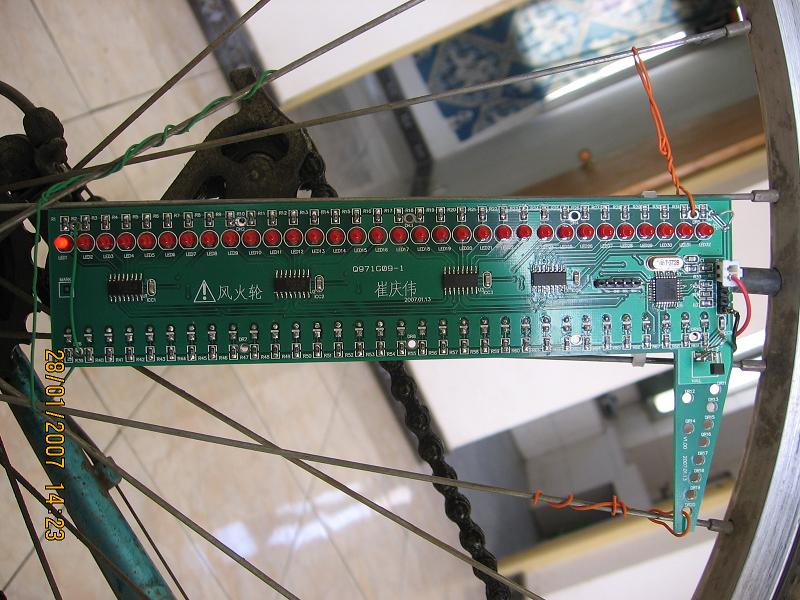
* 风火轮控制源码
* modification history
* --------------------
* 01a, 16.01.2007, cuiqingwei written
* --------------------
******************************************************************************/
#include <avr/io.h>
#include <avr/interrupt.h>
#include <avr/eeprom.h>
//#include <avr/wdt.h>
//#include <avr/eeprom.h>
//#include <avr/pgmspace.h>
#include <util/delay.h>
/*----------------*
* 端口定义 *
*----------------*/
#define BOTTON_PIN PIND
#define bitBOTTON 2
#define HALL_PORT PORTD
#define HALL_PIN PIND
#define bitHALLOUT 3
#define bitHALLPWR 6
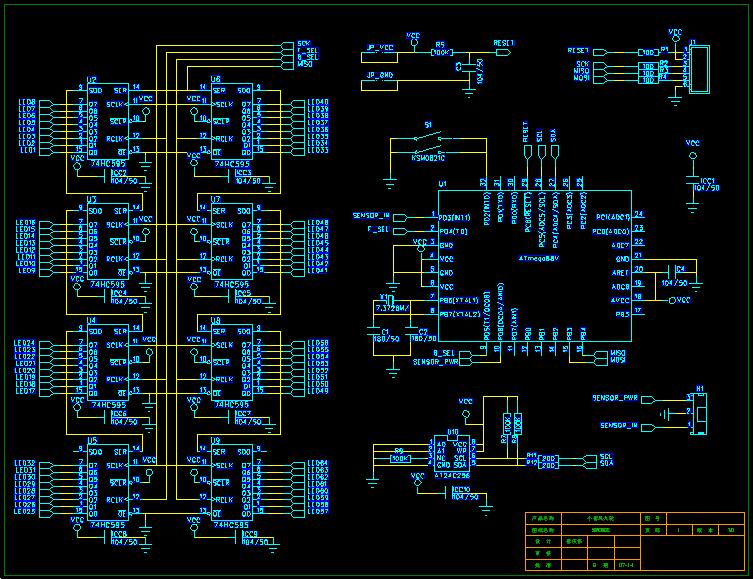
/*----------------*
* 74HC595引脚 *
*----------------*/
#define SEL_SIDE PORTD // 锁存时钟--74HC595 12#
#define bitFRONT 4
#define bitBACK 5
#define SET_SER PORTB|= _BV(PB4) // 数据------74HC595 14#
#define CLR_SER PORTB&=~_BV(PB4)
#define SET_SCLK PORTB|= _BV(PB5) // 移位时钟--74HC595 11#
#define CLR_SCLK PORTB&=~_BV(PB5)
/*----------------*
* 宏定义 *
*----------------*/
#define EN_ANIMATE 1 // 支持动画
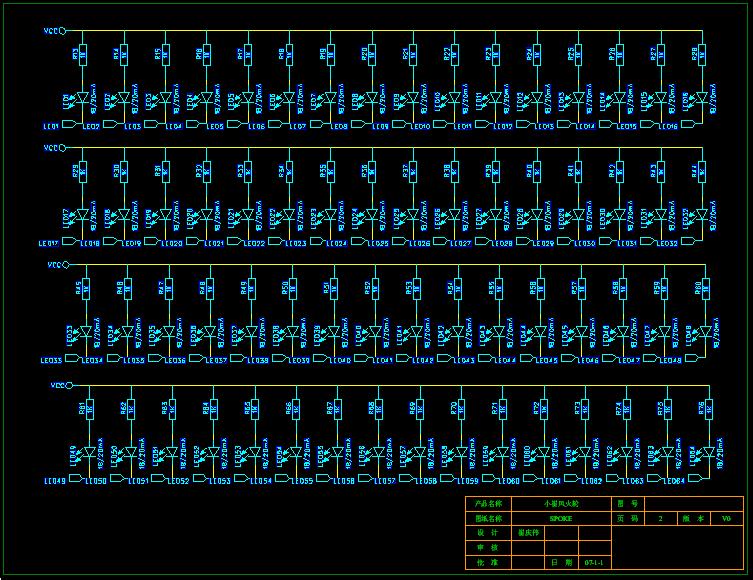
#define NUM_PIXELS 256 // 像素数256 (刚好一个字节)
#define NUM_LEDS 32 // 单面LED数据
#define HALL_DEBOUNCE 4 //
#define BUTTON_DEBOUNCE 100 // 100ms
#define STANDBY_TIMEOUT 5*((F_CPU/256)/0xff)// F_CPU晶振频率 约5S
#define POWEROFF_TIMEOUT 2*60*((F_CPU/256)/0xff)
/*----------------*
* EE地址定义 *
*----------------*/
#ifndef EEWE
#define EEWE 1
#endif
#ifndef EEMWE
#define EEMWE 2
#endif
#define E2_ROTATION_OFFSET 0x00
#define E2_MIRROR 0x01 // 镜相
#define E2_ANIMATION 0x02 // 动画
/*----------------*
* 变量定义 *
*----------------*/
volatile unsigned int tLap; // 轮子转一圈所用时间存放变量
volatile unsigned char tHall; // 霍尔传感器检测时间
unsigned char mirror; // 镜相
unsigned char fleds[4], bleds[4]; // 前、后面LED对应缓?
unsigned char tanim_dalay = 6; // 动画保持
volatile unsigned int tanim = 0; // 时间控制变量
volatile unsigned int anim_e2_offset= 0;
volatile unsigned int curr_e2_addr = 0; //
/*----------------*
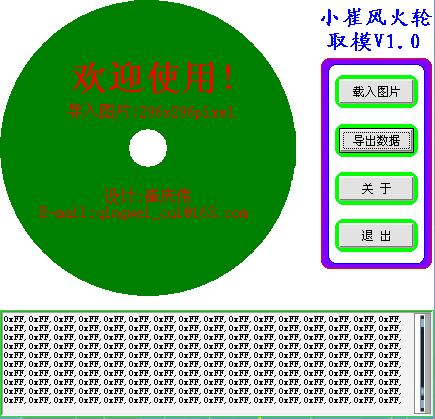
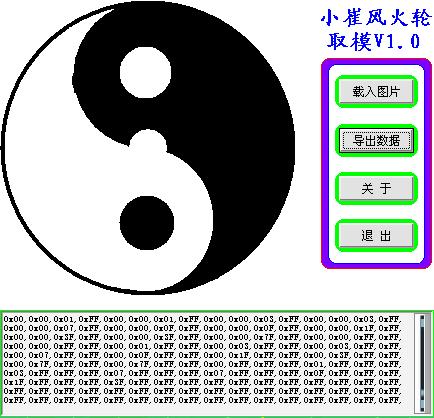
* 图像数据 *
*----------------*/
unsigned char val[] EEMEM ={ // 存入E2 EEMEM 等同于 __attribute__((section(".eeprom")))
"string in eeprom"};
/*----------------*
* 函数声名 *
*----------------*/
void cpu_init (void);
void refresh_leds(void);
void ctrl595_out (unsigned char);
void set_led (unsigned char , unsigned char );
void inter_eeprom_write (unsigned char , unsigned char );
unsigned char inter_eeprom_read (unsigned char );
unsigned char spi_transfer (unsigned char );
/*----------------------------------------------*
* CPU初始化 *
*----------------------------------------------*/
void cpu_init(void)
{
/* 端口配置 */
PORTB = 0xC7;
DDRB = 0x38;
PORTC = 0x7F; //m103 output only
DDRC = 0x00;
PORTD = 0x8F;
DDRD = 0x72;
PORTD = (_BV(bitBOTTON) | _BV(bitHALLOUT) | _BV(bitHALLPWR))
& ~_BV(bitFRONT) & ~_BV(bitBACK);
/* 看门狗 */
MCUSR = 0; // MCUSR 中的WDRF清零
WDTCSR = _BV(WDE) | _BV(WDP2) | _BV(WDP1); // 使能 1 S
/* 外部中断0、1低电平触发,0:按键;1:传感器 */
EICRA = _BV(ISC11) & ~_BV(ISC10) & _BV(ISC01) & ~_BV(ISC00);
/* 打开外部中断 */
EIMSK = _BV(INT1) | _BV(INT0);
/* 定时器0 */
TCCR0A = 0;
TCNT0 = 0xff; // 100us
TCCR0B = _BV(CS02); // 256分频 clk/256
TIMSK0|= _BV(TOIE0); // 打开溢出中断
/* 定时器1 CTC模式 */
TCCR1A = 0;
TCCR1B = _BV(WGM12); // WGM: 4) CTC, TOP=OCRnA
tHall = 0;
tLap = 0;
}
/*----------------------------------------------*
* 外部中断0:按键检测(低电平) *
*----------------------------------------------*/
SIGNAL (INT0_vect)
{
unsigned int t=0;
while (!(BOTTON_PIN & _BV(bitBOTTON))) // 等待释放按键
{
t++;
_delay_ms(1);
}
if (t > BUTTON_DEBOUNCE)
{
if (t < 500UL)
{
/* 短按键,小于500ms 打开看门狗死循环造成复位,激活系统 */
WDTCSR = _BV(WDE); // 使能看门狗
while (1);
}
else // 长按键休眠待机
tLap = 0xffff;
}
}
/*----------------------------------------------*
* 外部中断1:霍尔传感器触发(低电平) *
*----------------------------------------------*/
SIGNAL (INT1_vect)
{
if (tHall > HALL_DEBOUNCE) // 软抗骚扰,防止误触发
{
#if EN_ANIMATE // 动画支持
if (tanim != tanim_dalay)
{
tanim++;
}
else
{
tanim = 0;
anim_e2_offset += 1024;
}
#endif
/* 我们知道最后一次霍尔传感器触发后的毫秒数,
以及每次扫描有256条射线状“像素” 以便分别在
每个像素间断期间取得必要的毫秒数,现在仅仅使
得定时器1处于那个比率,也就是T/C1中断时间是
T0的256之1,T0所选时钟256分频,则T/C1所选时
时钟不分频*/
TCNT1 = 0; // timer1计数值清0
if ((tLap < 0xff) && (tLap > 0x3)) // 时间在短太长都不处理
{
OCR1A = (tLap << 8) | TCNT0; // 输了比较寄存器赋值
TCNT0 = 0; // T0计数值清零
/* 取出源数据存放地址 */
curr_e2_addr = (inter_eeprom_read(E2_ROTATION_OFFSET) % NUM_PIXELS)* 4;
mirror = inter_eeprom_read(E2_MIRROR);
TCCR1B |= _BV(CS10); // 时钟无分频
TIMSK1 |= _BV(OCIE1A); // T/C1输出比较A产生中断
}
else
{
set_led(2, bitFRONT);
set_led(2, bitBACK);
TCCR1B &= ~_BV(CS10); // 无时钟源,停止T/C1
}
tLap = 0;
}
tHall = 0;
}
/*----------------------------------------------*
* T0 100u定时中断 *
*----------------------------------------------*/
SIGNAL (TIMER0_OVF_vect)
{
if (tHall != 0xff)
tHall++;
if (tLap != 0xffff)
tLap++;
}
/*----------------------------------------------*
* T/C1 CTC(比较匹配时清零定时器)模式 *
* ------------------------------------ *
* 数器数值TCNT0一直累加到TCNT0与OCR0A匹配,然后 *
* TCNT0 清零.产生此中断 *
*----------------------------------------------*/
SIGNAL (TIMER1_COMPA_vect)
{
unsigned int addr;
sei();
addr = curr_e2_addr; // 源数据地址
if (tLap < STANDBY_TIMEOUT) // 转一圈地时间小于5S才显示
{
addr %= (NUM_PIXELS * 4);
ctrl595_out(inter_eeprom_read(addr + anim_e2_offset));// 要显示数据送出
SEL_SIDE |= _BV(bitFRONT);
asm("nop"); asm("nop");
asm("nop"); asm("nop");
SEL_SIDE &=~_BV(bitFRONT);
if (mirror)
{
ctrl595_out(inter_eeprom_read(anim_e2_offset + (1024UL-addr)));
SEL_SIDE |= _BV(bitBACK);
asm("nop"); asm("nop");
asm("nop"); asm("nop");
SEL_SIDE &=~_BV(bitBACK);
}
else
{
SEL_SIDE |= _BV(bitBACK);
asm("nop"); asm("nop");
asm("nop"); asm("nop");
SEL_SIDE &= ~_BV(bitBACK);
}
/*
fleds[0] = fleds[1] = fleds[2] = fleds[3] = 0xFF;
fleds[addr / 8] = ~(_BV(addr % 8));
clock_leds(bitFRONT);
addr++;
if (addr > 32)
addr = 0;
*/
/* 关中断,确保在同一时间其它中断打断写入此地址 */
cli();
if (addr == (curr_e2_addr%(NUM_PIXELS*4)))
{
curr_e2_addr = addr+4; // 地址指针移向下一数据区
}
//curr_e2_addr = addr;
sei();
}
else // 转一圈超过5S
{
cli();
TCCR1B &= ~0x7; // 关闭T/C1
sei();
set_led(2, bitFRONT); // turn off all but one LED;
set_led(2, bitBACK);
}
}
/*----------------------------------------------*
* 595输出控制 *
*----------------------------------------------*/
void ctrl595_out(unsigned char sel)
{
unsigned int i;
unsigned char *leds;
unsigned long dat;
if (sel == bitFRONT)
leds = fleds; // 前面
else
leds = bleds; // 后面
dat = ((long)leds[3]<<24)|((long)leds[2]<<16)|((long)leds[1]<<8)|leds[0];
for (i=0;i<NUM_LEDS;i++)
{
CLR_SCLK; // 移位时钟置低
if (dat&1)
SET_SER; // 置高数据时钟
else
CLR_SER; // 接低数据时钟
dat>>=1;
SET_SCLK; // __↑ 移位时钟上升沿,数据进入移位寄存器
}
SEL_SIDE |= _BV(sel);
asm("nop"); asm("nop");
asm("nop"); asm("nop"); // __
SEL_SIDE &=~_BV(sel); // __↑ 锁存电平上升沿,数据输出到并行端口
}
/*----------------------------------------------*
* LEDS 控制 *
*----------------------------------------------*/
void set_led(unsigned char led, unsigned char side)
{
unsigned char *leds;
if (side == bitFRONT)
leds = fleds;
else
leds = bleds;
leds[0] = leds[1] = leds[2] = leds[3] = 0xff;
leds[led/8] =~_BV(led%8);
ctrl595_out(side);
}
/*----------------------------------------------*
* LEDS 刷新 *
*----------------------------------------------*/
void refresh_leds(void)
{
unsigned char i;
for(i=0; i< NUM_LEDS; i++)
{
set_led(i, bitFRONT);
set_led(NUM_LEDS-i, bitBACK);
_delay_ms(50);
}
}
/*----------------------------------------------*
* 读内部eeprom *
*----------------------------------------------*/
unsigned char inter_eeprom_read(unsigned char addr)
{
loop_until_bit_is_clear(EECR, EEWE);// 等待写完成
EEAR = addr;
EECR |= _BV(EERE); // 开始读EEPROM
return EEDR; // 返回仅1个时钟周期
}
/*----------------------------------------------*
* 写内部eeprom *
*----------------------------------------------*/
void inter_eeprom_write(unsigned char addr, unsigned char data)
{
loop_until_bit_is_clear(EECR, EEWE);// 等待写完成
EEAR = addr;
EEDR = data;
cli(); // 关闭所有中断
EECR |= _BV(EEMWE); // 此操作必须在4个时钟周期内发生
EECR |= _BV(EEWE);
sei(); // 打开中断
}
int main (void)
{
cpu_init();
while(1)
{
asm("wdr");
if (tLap == 0xFFFF)
{
cli();
/* 关闭的有LED及霍尔传感器 */
set_led(0, bitFRONT);
set_led(0, bitBACK);
HALL_PORT &=~_BV(bitHALLPWR);
/* 关闭看门狗 */
WDTCSR |= _BV(WDCE) | _BV(WDE);
WDTCSR = 0;
/* 休眠待机 */
MCUCR |= _BV(SM1) | _BV(SM0) | _BV(SE);
sei();
asm("sleep");
}
}
}
/*----------------------------------END OF FILE-------------------------------*/ |
|



 发表于 2007-1-29 08:53:50
发表于 2007-1-29 08:53:50