[1] Details of the Laser Range finder
http://www.eng.buffalo.edu/ubr/ff03laser.php
[2] Webcam Based DIY Laser Rangefinder
http://sites.google.com/site/todddanko/home/webcam_laser_ranger
[3] K. Konolige, J. Augenbraun, N. Donaldson, C. Fiebig, and P. Shah. A low-cost laser distance sensor. In Int. Conference on Robotics and Automation (ICRA), 2008.
[4] Kenneth Maxon. A Real-time Laser Range Finding Vision System
http://www.seattlerobotics.org/encoder/200110/vision.htm
[5] Fisher, R. B. and D. K. Naidu. A Comparison of Algorithms for Subpixel Peak Detection. Springer-Verlag, Heidelberg, 1996.
[6] Mertz, C., J. Kozar, J.R. Miller, and C. Thorpe. Eye-safe Laser Line Striper for Outside Use. Intelligent Vehicle Symposium, 2002.
[7] J. Forest, J. Salvi, E. Cabruja, C. Pous, Laser stripe peak detector for 3D scanners. A FIR filter approach, in: International Conference on Pattern Recognition, Cambridge, August 2004, pp. 646–649
[8] Learning OpenCV: Computer Vision with OpenCV Library, Gary Bradski and Adrian Kachlev, first edition , 2008 O’Reilly, ISBN 978-0-569-51613.
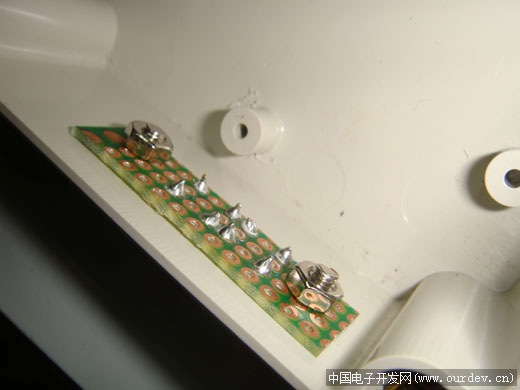
这里我才用了我们RoboPeak机器人团队设计的一款AVR开源控制版:RoboPeak Usb Connector[2]来实现这部分功能。它使用单片AVR(Atmega88)芯片通过软 件方式模拟出USB协议栈,并且使用了HID协议使得无需在PC上安装驱动程序。对于这部分的细节属于固件实现部分,将 在后文提到。