|
|

楼主 |
发表于 2010-10-22 10:01:07
|
显示全部楼层
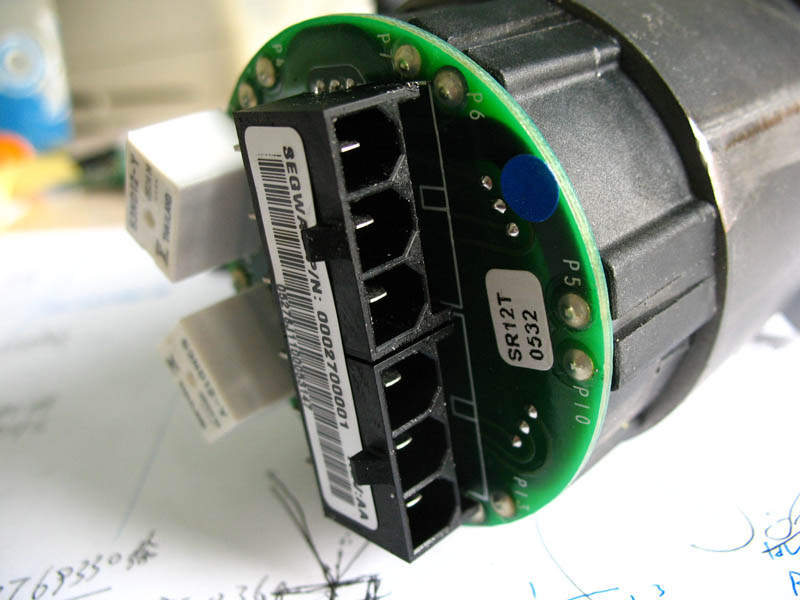
电机是我们拆的旧segway上的,功率号称有1000多W,非常大,产地是墨西哥
内部的绕线结构我们查了下,画了个示意图如下:
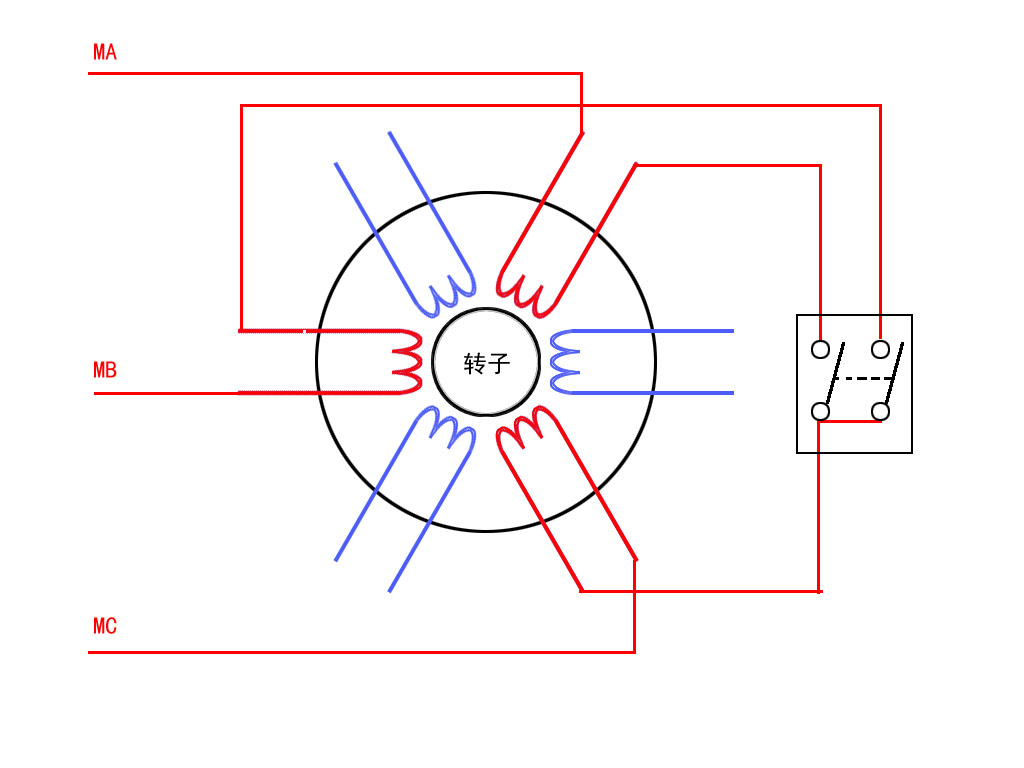
方法 (原文件名:sewgway电机.jpg)
大家都知道segway 做了很好的备份工作,连电机内部都有2个一样的绕组,驱动同一个转子,具体如何同步的,还不清楚,而且这种电机也是特制的,很少看过
图中分为蓝色和红色两组绕组,蓝色的引线我就省了,是完全一样的。
红色的部分为例。
有三个绕组,每个绕组都有进出2根线,对应的就是顶楼照片中的一对,一对的引线出头。
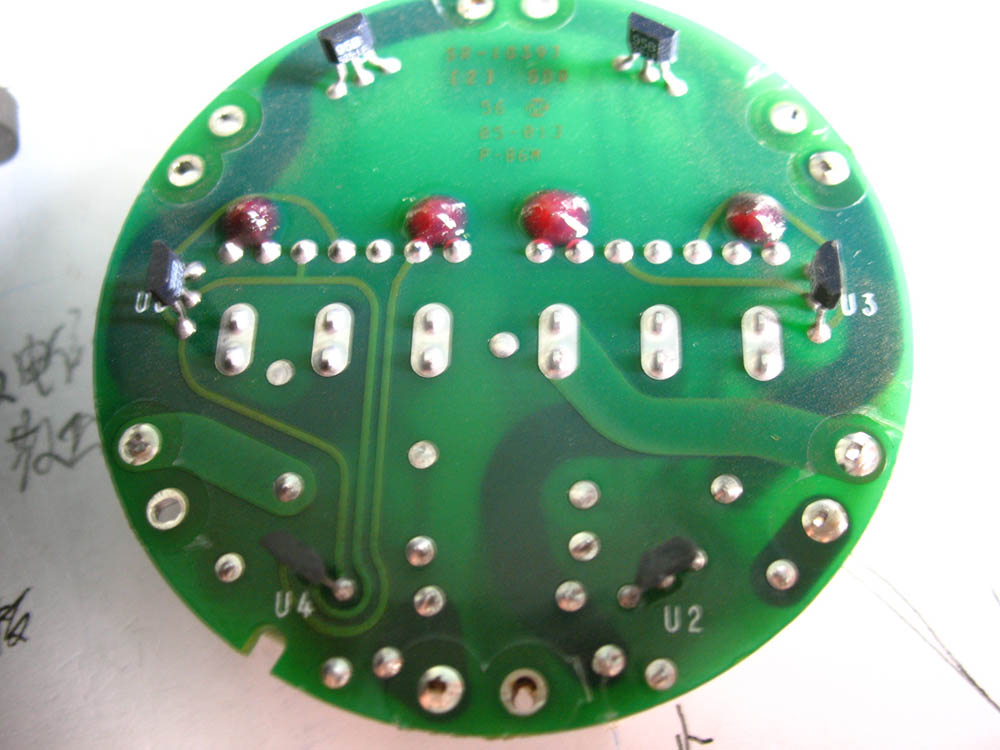
接到电机尾部的电路板上之后,将会这么走:三个绕组中各抽一根线,连驱动桥,即MA,MB.MC三相
另外的三根线练到一个双刀继电器上。
大家都知道普通的直流无刷电机的绕组是要共中点的即Y型绕组,当继电器吸合后,三个绕组算是连接在一起,就可以正常工作了。
但是为何需要继电器呢?
因为当如果一套系统损坏的时候,有一种可能就是桥臂直通,导致MA,MB,MC中互相存在短路现象。做过电机的同志都知道,电机的2根线短路会将电机死死锁住,很难转动,所以这个时候即使另外一侧的系统是OK的,带动电机运转的时候也会产生很大的阻力。
为了克服该问题,解决办法就是主动把电机的三个绕组分开,这个继电器就是起到这个作用。其实如果在MA,MB两相上单独加上双刀双掷继电器也是一样效果。
默认情况,继电器是断开的,只有本侧电路系统工作良好的情况下,继电器才合上,电机才能正常运转,其他所有故障情况下,继电器均断开,不影响另一侧系统的工作。 |
|


 发表于 2010-8-17 09:08:04
发表于 2010-8-17 09:08:04


 mark
mark