|
|

楼主 |
发表于 2009-4-16 17:37:09
|
显示全部楼层
【19楼】 feng_matrix
1.为何PITCH轴与ROLL轴陀螺仪的灵敏度不同?
我的硬件只安装了roll轴的陀螺,使用的是EWTS82,25mv/(度/秒),计算后得到roll_rate = gyro_x * 0.002250;
“pitch_rate = gyro_y * 0.0281230;”是原帖子里的,因为没用到,所以忘了改了。
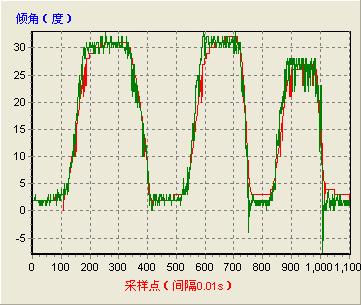
2. roll = atan2(accel_y, accel_z);
pitch = atan2(-accel_x, accel_z);
这里是根据mma7260的三轴加速度输出来计算横滚角和俯仰角,与陀螺无关。这里并不是硬件装反了,而是由mma7260的特性决定的。
如果四轴的十字支撑架x轴(前后俯仰轴)和y轴(左右横滚轴)分别平行于mma7260的x轴和y轴,并规定顺时针转角为正,则对应x轴和y轴的同样一个转角,accel_y 和accel_x必然符号相反。
3.你的KALMAN滤波初时化参数比较奇怪,系统多长时间运算一次?
初始化参数我没有修改,还是按照原帖子里的程序设置的
static float A[2][2] = {{1.0, -0.019968}, {0.0, 1.0}};
static float B[2][1] = {{0.019968}, {0.0}};
0.019968应该是采样时间间隔,我通过定时器每隔0.02秒运算一次
现在正在学avr32,也准备用它来做 |
|
 [复制链接]
[复制链接]



 发表于 2009-3-30 13:27:28
发表于 2009-3-30 13:27:28