|
|
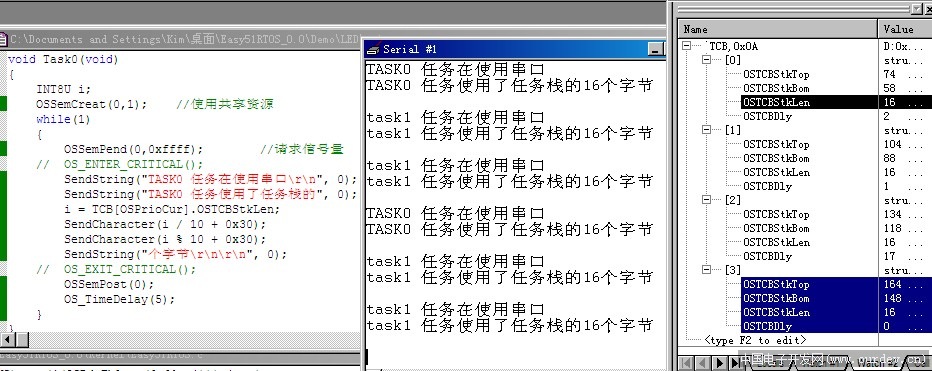
首先上51版本
keil3编译版本,89c52单片机运行,仿真proteus7.5sp3ourdev_567245VTCPKX.rar(文件大小:59K) (原文件名:RaysRTOS-89C52keil.rar)
由于是优先级抢占式调度,建立了两个任务,占用ram稍微较大,flash占用还可以,占用情况如下:
Program Size: data=92.0 xdata=0 code=950
下面是系统函数声明
/*--------------------------------------------------------------------------------------+
|系统函数声明 |
+---------------------------------------------------------------------------------------*/
void RAYS_TaskCreate(void (*Task)(void),INT8U *Stack,INT8U t_Prio);//创建任务
void RAYS_Start(void); //系统启动函数
void RAYS_TaskResume(INT8U prio); //任务恢复函数
void RAYS_TaskSuspend(INT8U prio); //任务挂起函数
void OSSched(void); //汇编调度函数
void RAYS_TimeDelay(INT16U ticks); //任务延时函数
void Idle_Task(void);
void RAYS_Init(void); //系统初始化
void TickIntHook(void); //系统节拍钩子函数
再上avr版本
用winavr20060421编译,ide选择的是Eclipse,也可以用winavr编译,仿真同样是proteus7.5sp3,调度在16兆只用10us(avrstudio软测)ourdev_567246HOADLD.rar(文件大小:47K) (原文件名:RaysRTOS-Eclipse.rar)
单片机型号分别测试了mega128 和mega8,都可以运行,但程序如果大于64k的话调度部分pc需要改动一下
由于是优先级抢占式调度,建立了3个任务,占用情况如下:
Program: 1178 bytes (14.4% Full)
(.text + .data + .bootloader)
Data: 225 bytes (22.0% Full)
(.data + .bss + .noinit)
默认优先级0s
/*--------------------------------------------------------------------------------------+
|系统函数声明 |
+---------------------------------------------------------------------------------------*/
void RAYS_TaskCreate(void (*Task)(void),INT8U *Stack,INT8U t_Prio);//创建任务
void RAYS_Start(void); //系统启动函数
void RAYS_TaskResume(INT8U prio); //任务恢复函数
void RAYS_TaskSuspend(INT8U prio); //任务挂起函数
void OSSched(void); //汇编调度函数
void RAYS_TimeDelay(INT16U ticks); //任务延时函数
void Idle_Task(void);
void RAYS_Init(void); //系统初始化
void TickIntHook(void); //系统节拍钩子函数
最后来stm8s105c6版本,本人手上只有这个小小的discovery板子,100块买的,所以先拿它做的测试,很稳定!
(原文件名:未命名.JPG)
编译器选择的是IAR,因为它里边支持c语言是用的模拟寄存器!!!!stvd好像用的是堆栈,导致在stvd上做系统几乎不可能
stm8工程,是stm8s105c6版本,仿真是硬件仿真,因为proteus不支持stm8:(ourdev_567253FKWHEQ.rar(文件大小:44K) (原文件名:RaysRTOS-STM8IAR.rar)
flash和ram占用情况如下:
941 bytes of readonly code memory
132 bytes of readonly data memory
499 bytes of readwrite data memory
我感觉ram占用有点大,后来我编写了个什么都没有的main函数,ram占用是272B,所以本系统ram占用应该是499-272=227B
优化级别选则balance.
/*--------------------------------------------------------------------------------------+
|系统函数声明 |
+---------------------------------------------------------------------------------------*/
void RAYS_TaskCreate(void (*Task)(void),INT8U *Stack,INT8U t_Prio);//创建任务
void RAYS_Start(void); //系统启动函数
void RAYS_TaskResume(INT8U prio); //任务恢复函数
void RAYS_TaskSuspend(INT8U prio); //任务挂起函数
void OSSched(void); //汇编调度函数
void RAYS_TimeDelay(INT16U ticks); //任务延时函数
void Idle_Task(void);
void RAYS_Init(void); //系统初始化
void TickIntHook(void); //系统节拍钩子函数

欢迎大家测试,我是新手,难免有很多bug,三种版本90%代码都一样,与cpu最相关的RaysRTOS_ASM文件差异较大,不过格式也一样.
我的qq 771992497
最后还想来个版本,就是lisuwei的那个版本的修改版,2440平台,因为它的那个版本没有初始化mmu,所以导致只能在nor里运行,这个修改版是在ram或者nand里边运行的,和正常的2440_test什么的程序一样,通过boot下载到nand 0x000地址或者ram的0x30000000地址都可以运行!!!
考虑到开发2440习惯,有人熟悉ads,有人喜欢keil4,所以我修改成了两个版本,都可以跑,希望大家测试
ads1.2版本工程ourdev_567269TVNLE3.rar(文件大小:51K) (原文件名:SIMPLE_2440.rar)
keil4版本工程ourdev_567270UBQ2B1.rar(文件大小:324K) (原文件名:SIMPLE_2440_RV.rar)

最后再感谢lisuwei把我带入rtos大门,还要感谢上官兄,没他的代码我不会stm8汇编 |
|



 发表于 2010-7-12 10:53:27
发表于 2010-7-12 10:53:27
 楼主
楼主