|
|

楼主 |
发表于 2011-1-17 01:06:59
|
显示全部楼层
回42楼:楼主所述这些,在RT-THREAD的串口驱动中,可以看到。一模一样
RT-Thread是一款优秀的ROTS,在下十分佩服,也正在学习,说实话,也略有所知。
但是“一模一样”这四字,何处谈起?
在下有感于此,刚刚拜读了RT-Thread的串口驱动源代码,基本原理差不多,现列于下,
/*
* File : usart.c
* This file is part of RT-Thread RTOS
* COPYRIGHT (C) 2009, RT-Thread Development Team
*
* The license and distribution terms for this file may be
* found in the file LICENSE in this distribution or at
* http://www.rt-thread.org/license/LICENSE
*
* Change Logs:
* Date Author Notes
* 2009-01-05 Bernard the first version
* 2010-03-29 Bernard remove interrupt Tx and DMA Rx mode
*/
#include "usart.h"
#include <serial.h>
#include <stm32f10x_dma.h>
/*
* Use UART1 as console output and finsh input
* interrupt Rx and poll Tx (stream mode)
*
* Use UART2 with interrupt Rx and poll Tx
* Use UART3 with DMA Tx and interrupt Rx -- DMA channel 2
*
* USART DMA setting on STM32
* USART1 Tx --> DMA Channel 4
* USART1 Rx --> DMA Channel 5
* USART2 Tx --> DMA Channel 7
* USART2 Rx --> DMA Channel 6
* USART3 Tx --> DMA Channel 2
* USART3 Rx --> DMA Channel 3
*/
#ifdef RT_USING_UART1
struct stm32_serial_int_rx uart1_int_rx;
struct stm32_serial_device uart1 =
{
USART1,
&uart1_int_rx,
RT_NULL
};
struct rt_device uart1_device;
#endif
#ifdef RT_USING_UART2
struct stm32_serial_int_rx uart2_int_rx;
struct stm32_serial_device uart2 =
{
USART2,
&uart2_int_rx,
RT_NULL
};
struct rt_device uart2_device;
#endif
#ifdef RT_USING_UART3
struct stm32_serial_int_rx uart3_int_rx;
struct stm32_serial_dma_tx uart3_dma_tx;
struct stm32_serial_device uart3 =
{
USART3,
&uart3_int_rx,
&uart3_dma_tx
};
struct rt_device uart3_device;
#endif
#define USART1_DR_Base 0x40013804
#define USART2_DR_Base 0x40004404
#define USART3_DR_Base 0x40004804
/* USART1_REMAP = 0 */
#define UART1_GPIO_TX GPIO_Pin_9
#define UART1_GPIO_RX GPIO_Pin_10
#define UART1_GPIO GPIOA
#define RCC_APBPeriph_UART1 RCC_APB2Periph_USART1
#define UART1_TX_DMA DMA1_Channel4
#define UART1_RX_DMA DMA1_Channel5
#if defined(STM32F10X_LD) || defined(STM32F10X_MD) || defined(STM32F10X_CL)
#define UART2_GPIO_TX GPIO_Pin_5
#define UART2_GPIO_RX GPIO_Pin_6
#define UART2_GPIO GPIOD
#define RCC_APBPeriph_UART2 RCC_APB1Periph_USART2
#else /* for STM32F10X_HD */
/* USART2_REMAP = 0 */
#define UART2_GPIO_TX GPIO_Pin_2
#define UART2_GPIO_RX GPIO_Pin_3
#define UART2_GPIO GPIOA
#define RCC_APBPeriph_UART2 RCC_APB1Periph_USART2
#define UART2_TX_DMA DMA1_Channel7
#define UART2_RX_DMA DMA1_Channel6
#endif
/* USART3_REMAP[1:0] = 00 */
#define UART3_GPIO_RX GPIO_Pin_11
#define UART3_GPIO_TX GPIO_Pin_10
#define UART3_GPIO GPIOB
#define RCC_APBPeriph_UART3 RCC_APB1Periph_USART3
#define UART3_TX_DMA DMA1_Channel2
#define UART3_RX_DMA DMA1_Channel3
static void RCC_Configuration(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
#ifdef RT_USING_UART1
/* Enable USART1 and GPIOA clocks */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
#endif
#ifdef RT_USING_UART2
#if (defined(STM32F10X_LD) || defined(STM32F10X_MD) || defined(STM32F10X_CL))
/* Enable AFIO and GPIOD clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_GPIOD, ENABLE);
/* Enable the USART2 Pins Software Remapping */
GPIO_PinRemapConfig(GPIO_Remap_USART2, ENABLE);
#else
/* Enable AFIO and GPIOA clock */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO | RCC_APB2Periph_GPIOA, ENABLE);
#endif
/* Enable USART2 clock */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);
#endif
#ifdef RT_USING_UART3
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
/* Enable USART3 clock */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE);
/* DMA clock enable */
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
#endif
}
static void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
#ifdef RT_USING_UART1
/* Configure USART1 Rx (PA.10) as input floating */
GPIO_InitStructure.GPIO_Pin = UART1_GPIO_RX;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(UART1_GPIO, &GPIO_InitStructure);
/* Configure USART1 Tx (PA.09) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = UART1_GPIO_TX;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(UART1_GPIO, &GPIO_InitStructure);
#endif
#ifdef RT_USING_UART2
/* Configure USART2 Rx as input floating */
GPIO_InitStructure.GPIO_Pin = UART2_GPIO_RX;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(UART2_GPIO, &GPIO_InitStructure);
/* Configure USART2 Tx as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = UART2_GPIO_TX;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(UART2_GPIO, &GPIO_InitStructure);
#endif
#ifdef RT_USING_UART3
/* Configure USART3 Rx as input floating */
GPIO_InitStructure.GPIO_Pin = UART3_GPIO_RX;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(UART3_GPIO, &GPIO_InitStructure);
/* Configure USART3 Tx as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = UART3_GPIO_TX;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(UART3_GPIO, &GPIO_InitStructure);
#endif
}
static void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
#ifdef RT_USING_UART1
/* Enable the USART1 Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
#endif
#ifdef RT_USING_UART2
/* Enable the USART2 Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
#endif
#ifdef RT_USING_UART3
/* Enable the USART3 Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
/* Enable the DMA1 Channel2 Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = DMA1_Channel2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
#endif
}
static void DMA_Configuration(void)
{
#if defined (RT_USING_UART3)
DMA_InitTypeDef DMA_InitStructure;
/* fill init structure */
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
DMA_InitStructure.DMA_Priority = DMA_Priority_VeryHigh;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
/* DMA1 Channel5 (triggered by USART3 Tx event) Config */
DMA_DeInit(UART3_TX_DMA);
DMA_InitStructure.DMA_PeripheralBaseAddr = USART3_DR_Base;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST;
DMA_InitStructure.DMA_MemoryBaseAddr = (u32)0;
DMA_InitStructure.DMA_BufferSize = 0;
DMA_Init(UART3_TX_DMA, &DMA_InitStructure);
DMA_ITConfig(UART3_TX_DMA, DMA_IT_TC | DMA_IT_TE, ENABLE);
DMA_ClearFlag(DMA1_FLAG_TC5);
#endif
}
/*
* Init all related hardware in here
* rt_hw_serial_init() will register all supported USART device
*/
void rt_hw_usart_init()
{
USART_InitTypeDef USART_InitStructure;
USART_ClockInitTypeDef USART_ClockInitStructure;
RCC_Configuration();
GPIO_Configuration();
NVIC_Configuration();
DMA_Configuration();
/* uart init */
#ifdef RT_USING_UART1
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_ClockInitStructure.USART_Clock = USART_Clock_Disable;
USART_ClockInitStructure.USART_CPOL = USART_CPOL_Low;
USART_ClockInitStructure.USART_CPHA = USART_CPHA_2Edge;
USART_ClockInitStructure.USART_LastBit = USART_LastBit_Disable;
USART_Init(USART1, &USART_InitStructure);
USART_ClockInit(USART1, &USART_ClockInitStructure);
/* register uart1 */
rt_hw_serial_register(&uart1_device, "uart1",
RT_DEVICE_FLAG_RDWR | RT_DEVICE_FLAG_INT_RX | RT_DEVICE_FLAG_STREAM,
&uart1);
/* enable interrupt */
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
#endif
#ifdef RT_USING_UART2
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_ClockInitStructure.USART_Clock = USART_Clock_Disable;
USART_ClockInitStructure.USART_CPOL = USART_CPOL_Low;
USART_ClockInitStructure.USART_CPHA = USART_CPHA_2Edge;
USART_ClockInitStructure.USART_LastBit = USART_LastBit_Disable;
USART_Init(USART2, &USART_InitStructure);
USART_ClockInit(USART2, &USART_ClockInitStructure);
/* register uart2 */
rt_hw_serial_register(&uart2_device, "uart2",
RT_DEVICE_FLAG_RDWR | RT_DEVICE_FLAG_INT_RX | RT_DEVICE_FLAG_STREAM,
&uart2);
/* Enable USART2 DMA Rx request */
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);
#endif
#ifdef RT_USING_UART3
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_ClockInitStructure.USART_Clock = USART_Clock_Disable;
USART_ClockInitStructure.USART_CPOL = USART_CPOL_Low;
USART_ClockInitStructure.USART_CPHA = USART_CPHA_2Edge;
USART_ClockInitStructure.USART_LastBit = USART_LastBit_Disable;
USART_Init(USART3, &USART_InitStructure);
USART_ClockInit(USART3, &USART_ClockInitStructure);
uart3_dma_tx.dma_channel= UART3_TX_DMA;
/* register uart3 */
rt_hw_serial_register(&uart3_device, "uart3",
RT_DEVICE_FLAG_RDWR | RT_DEVICE_FLAG_INT_RX | RT_DEVICE_FLAG_DMA_TX,
&uart3);
/* Enable USART3 DMA Tx request */
USART_DMACmd(USART3, USART_DMAReq_Tx , ENABLE);
/* enable interrupt */
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);
#endif
}
这里是在下的代码,
我的工程文件有五个部分,
USART1.c
USART1ConFig.c
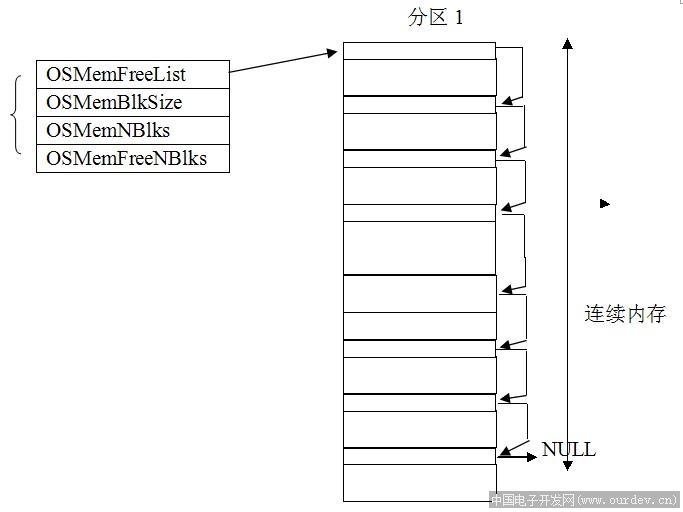
OSMem.c
USART.H
OSMem.H
现随便将一个代码贴出:
/*******************************************************************************
* 文件名 : USART1.c
* 描述 : USART的驱动函数
* 移植步骤 : 中间层函数
* 输入 : 无
* 输出 : 无
* 返回 : 无
*******************************************************************************/
#include "stm32f10x_lib.h"
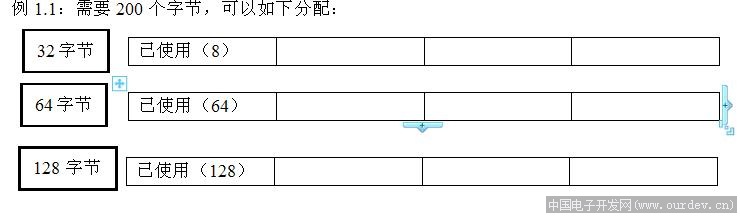
#define USART1_SEND_MAX_Q 16 //发送内存块内的最大空间
#define USART1_SEND_MAX_BOX 128 //发送内存块的最大数量
unsigned char USART1SendQBuffer[USART1_SEND_MAX_BOX][USART1_SEND_MAX_Q];//发送内存块
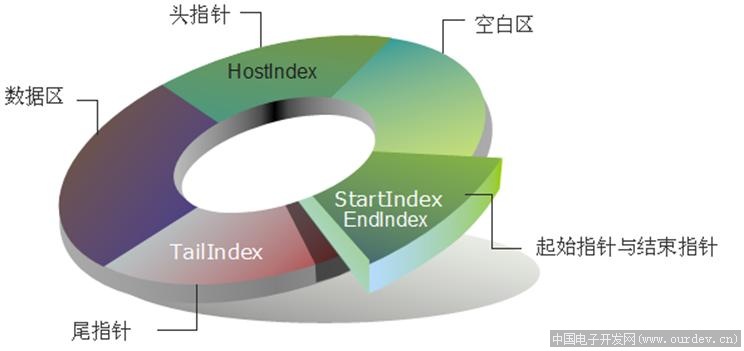
unsigned char USART1SendQBoxHost=0; //内存块头指针
unsigned char USART1SendQBoxTail=0; //内存块尾指针
unsigned int USART1SendQFree=USART1_SEND_MAX_BOX;
unsigned char USART1SendOVF=0; //USART1发送任务块溢出标志
unsigned char USART1RunningFlag=0;
typedef struct{
unsigned char Num;
unsigned char Index[USART1_SEND_MAX_Q];
}USART1SendTCB;
USART1SendTCB USART1TCB[USART1_SEND_MAX_BOX];
#define USART1_RECV_MAX_Q 128 //内存块内的最大空间
#define USART1_RECV_MAX_BOX 32 //内存块的最大数量
unsigned char USART1QRecvBuffer[USART1_RECV_MAX_BOX][USART1_RECV_MAX_Q];//接收内存块
unsigned char USART1QRecvBoxHost=0; //接收内存块头指针
unsigned char USART1QRecvBoxTail=0; //接收内存块尾指针
unsigned int USART1QRecvFree=USART1_RECV_MAX_BOX;
unsigned char USART1RecvOVF=0; //USART2接收任务块溢出标志
static unsigned char USART1RecvChar;
unsigned char Recv1Index=0x00;
//错误定义
#define ERR_NO_SPACE 0xff
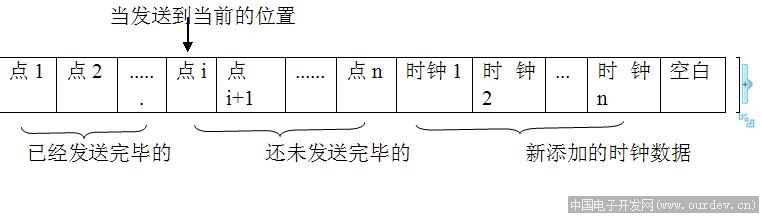
/*******************************************************************************
* 文件名 : USART1SendUpdate
* 描述 : 检查结构体里面有没有数据还未发送完毕,若没有发送,则继续发送,
若发送完毕,退出
* 输入 : 无
* 输出 : 无
* 返回 : 无
*******************************************************************************/
void USART1SendUpdate(void)
{
static unsigned char count=0;
USART1StopISR();
if(USART1SendQFree==USART1_SEND_MAX_BOX)return;
if((USART1TCB[USART1SendQBoxTail].Num)&&(USART1SendQBoxTail!=USART1SendQBoxHost))
{
USART1TCB[USART1SendQBoxTail].Num--;
USART1SendByte(*(USART1TCB[USART1SendQBoxTail].Index+count));
count++;
}
else if(USART1SendQBoxTail!=USART1SendQBoxHost)
{
if(++USART1SendQBoxTail>=USART1_SEND_MAX_BOX)USART1SendQBoxTail=0;
if(++USART1SendQFree>=USART1_SEND_MAX_BOX)USART1SendQFree=USART1_SEND_MAX_BOX;
count=0;
if((USART1TCB[USART1SendQBoxTail].Num)&&(USART1SendQBoxTail!=USART1SendQBoxHost))
{
USART1TCB[USART1SendQBoxTail].Num--;
USART1SendByte(*(USART1TCB[USART1SendQBoxTail].Index+count));
count++;
}
else
{
USART1RunningFlag=0;
USART1SendQFree=USART1_SEND_MAX_BOX;
count=0;
}
}
else
{
USART1RunningFlag=0;
USART1SendQFree=USART1_SEND_MAX_BOX;
count=0;
}
USART1StartISR();
}
/*******************************************************************************
* 文件名 : USART1WriteDataToBuffer
* 描述 : 检查发送缓冲区的大小,若空间足够,将待发送的数据放入到发送缓冲
区中去,并且启动发送
* 输入 : buffer待发送的数据的指针,count待发送的数据的数量
* 输出 : 无
* 返回 : 若正确放入到发送缓冲区中去了,就返回0x00 ,否则返回0x01
*******************************************************************************/
unsigned char USART1WriteDataToBuffer(unsigned char *buffer,unsigned char count)
{
if(count%USART1_SEND_MAX_Q)count=count/USART1_SEND_MAX_Q+1;
else count=count/USART1_SEND_MAX_Q;
if(USART1SendQFree<count)return ERR_NO_SPACE;
count=0;
while(*buffer!='\0')
{
*(USART1TCB[USART1SendQBoxHost].Index+count)=*buffer;
count++;
if(count>=USART1_SEND_MAX_Q)
{
USART1TCB[USART1SendQBoxHost].Num=USART1_SEND_MAX_Q;
if(++USART1SendQBoxHost>=USART1_SEND_MAX_BOX)USART1SendQBoxHost=0;
USART1SendQFree--;
count=0;
}
buffer++;
}
if(count!=0)
{
USART1TCB[USART1SendQBoxHost].Num=count;
USART1SendQFree--;
if(++USART1SendQBoxHost>=USART1_SEND_MAX_BOX)USART1SendQBoxHost=0;
}
if(USART1RunningFlag==0)
{
USART1SendUpdate();
USART1RunningFlag=1;
}
return 0x00;
}
/*******************************************************************************
* 文件名 : USART1DispFun
* 描述 : 检查发送缓冲区的大小,若空间足够,将待发送的数据放入到发送缓冲
区中去,并且启动发送,与USART1WriteDataToBuffer不同的是,启动发送
函数世不需要指定文件大小的,这就给调用提供了方便.
* 输入 : buffer待发送的数据的指针
* 输出 : 无
* 返回 : 若正确放入到发送缓冲区中去了,就返回0x00 ,否则返回0x01
*******************************************************************************/
unsigned char USART1DispFun(unsigned char *buffer)
{
unsigned long count=0;
while(buffer[count]!='\0')count++;
return(USART1WriteDataToBuffer(buffer,count));
}
在下机械专业出生,刻苦自学,经过接近一年的学习习,在下的编程风格已趋稳定,
请问诸位朋友觉得我的程序真的如42楼所说与RT-Thread的程序是“一模一样”吗?
唉,令人寒心~~~ |
|
 [复制链接]
[复制链接]



 发表于 2011-1-16 15:34:59
发表于 2011-1-16 15:34:59