|
|

楼主 |
发表于 2011-1-21 14:17:34
|
显示全部楼层
回复【8楼】c.azrael
强大啊,不知lz现在做到什么程度了
-----------------------------------------------------------------------
目前进度:
1. 数字式2.4GHz无线遥控组测试完成程式已公布, 其目的是改进PPM 规格对Channel 数限制的问题, 进而能更灵活的规划遥控参数。
a.例如, 油门改为放开中立型式和其他三轴摇杆一样, 用以实现高度上升、停滞、下降的飞行操作, 达到初学者辅助飞行功能, 遥控初学者常犯毛病是定死档又不会打反档, 都是因为不习惯重力及惯性对飞行器的影响。
b. 又如,高度锁定改由旋钮控制, 程式就可设计成由超音波测距+PID 锁住3公尺以内的高度, 只要初学者手都放开, 四轴自然停在旋钮设定的高度。
c. 其他更详细的规划, 会在模组应用篇发表。德国人其实是遥控模型高手, 他的调校经验是无法用分析硬体及软体取得的。机器不足的地方由人取代, 人弱处由机器补足, 找到平衡点时,就是最佳解决方案。
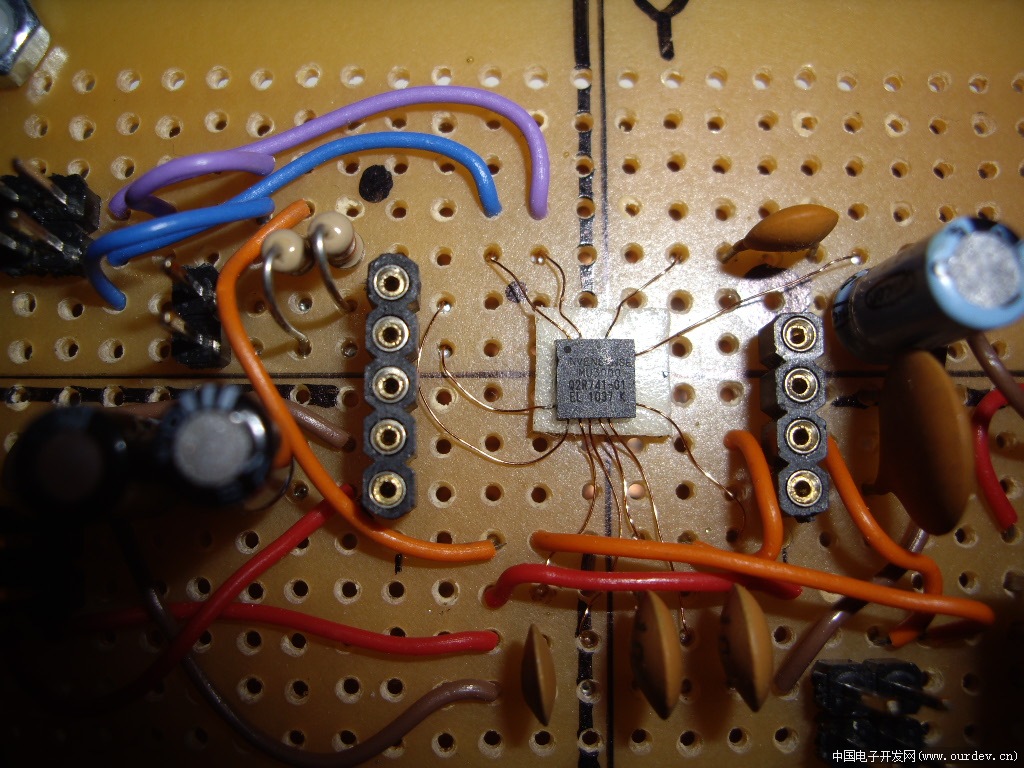
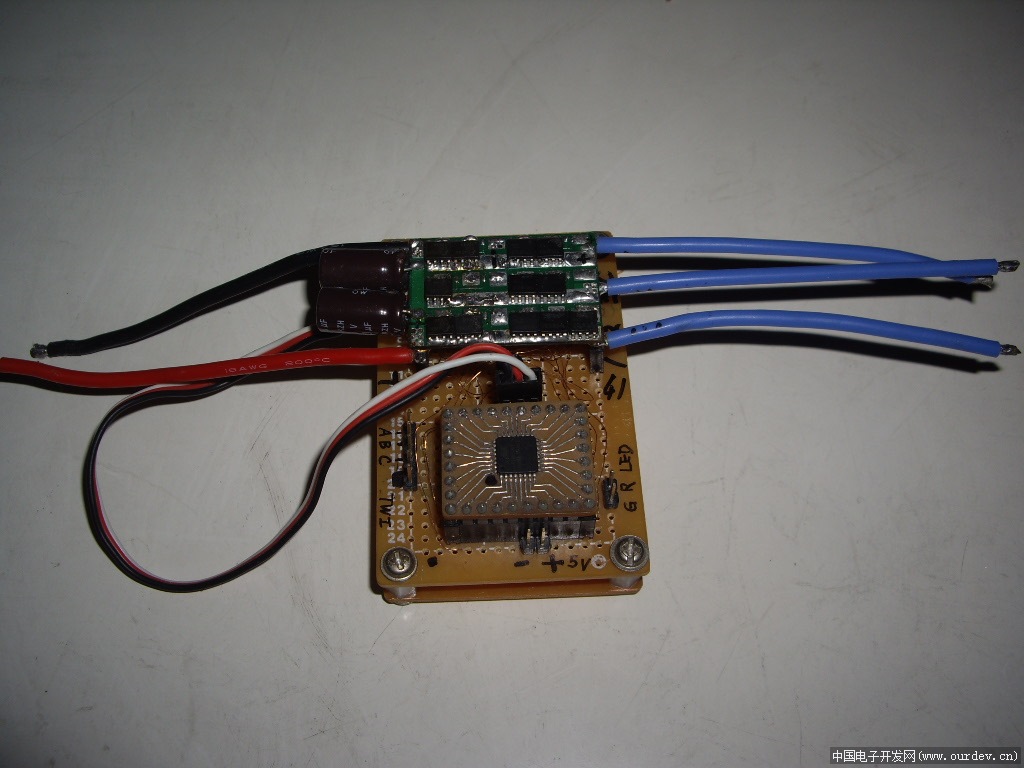
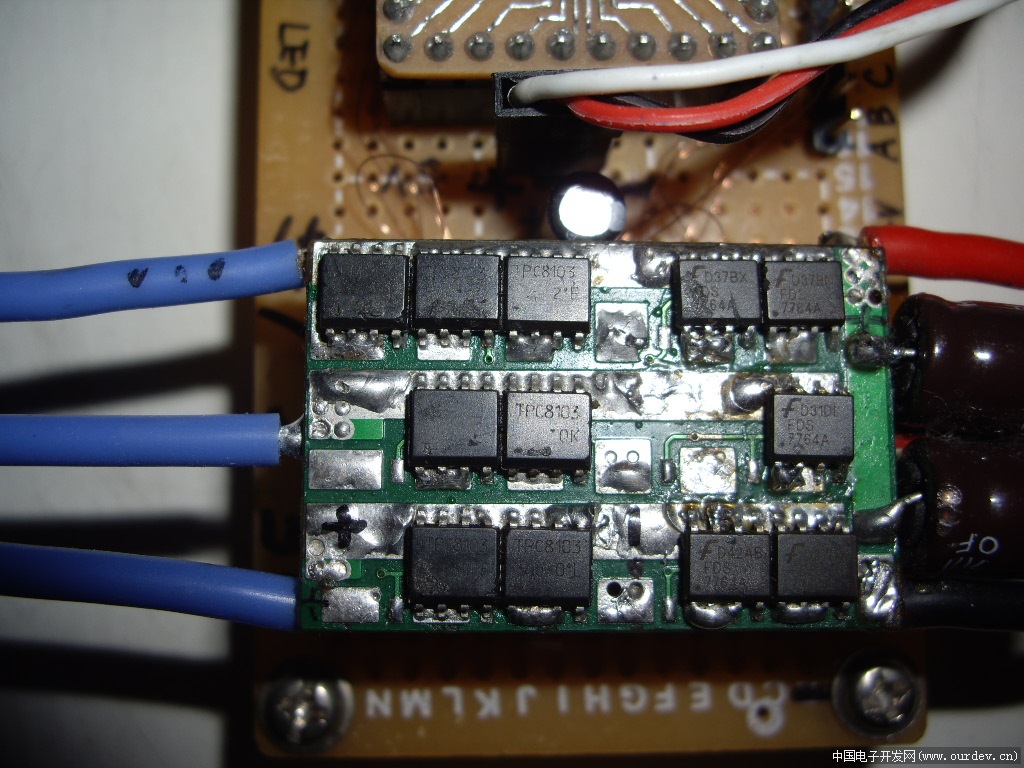
2. 电调模组程式已经完成, 可以传出转速及调速PWM占空比参数, 能锁转速的PID控制,马达快慢由传入的转速参数控制, 一样会在模组应用篇发表。待测部份是, 用转速和拉力的参数对应表, 配合摇杆位置值做线性比例式对应。
3. 飞行姿态模组程式完成, 资料透过USB 传入PC电脑,用OPENGL 画出像示波器一样的图, 用于资料分析。后面会在模组应用篇发表。
由下图可知陀螺仪在受力后角速值与绝对角度值的时间关系, 可做为分析参考。
白色:陀螺仪 ENC-03 , 红色:绝对角度值
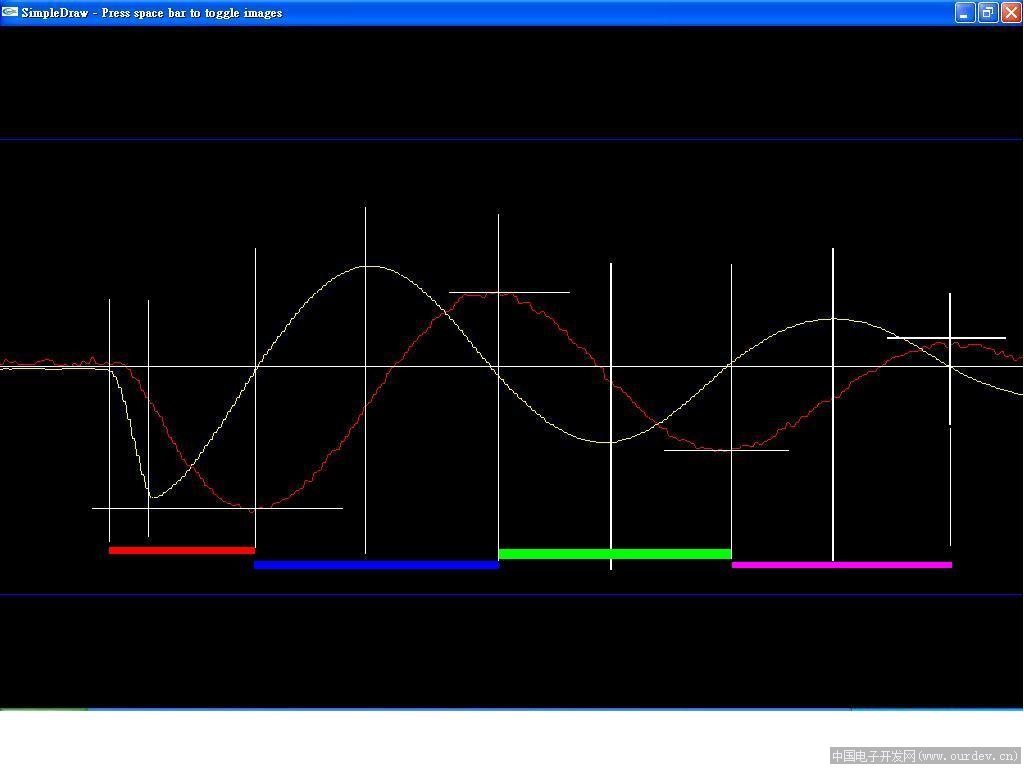
(原文件名:GYRO_001.JPG)
由下图可看出红绿交叠, 代表由陀螺仪取样值是可以计算目前机身顷角。
白色:陀螺仪 ENC-03 , 红色:绝对角度值, 绿色:累积位移值(由陀螺仪的角速值计算而来, 数学叫积分)
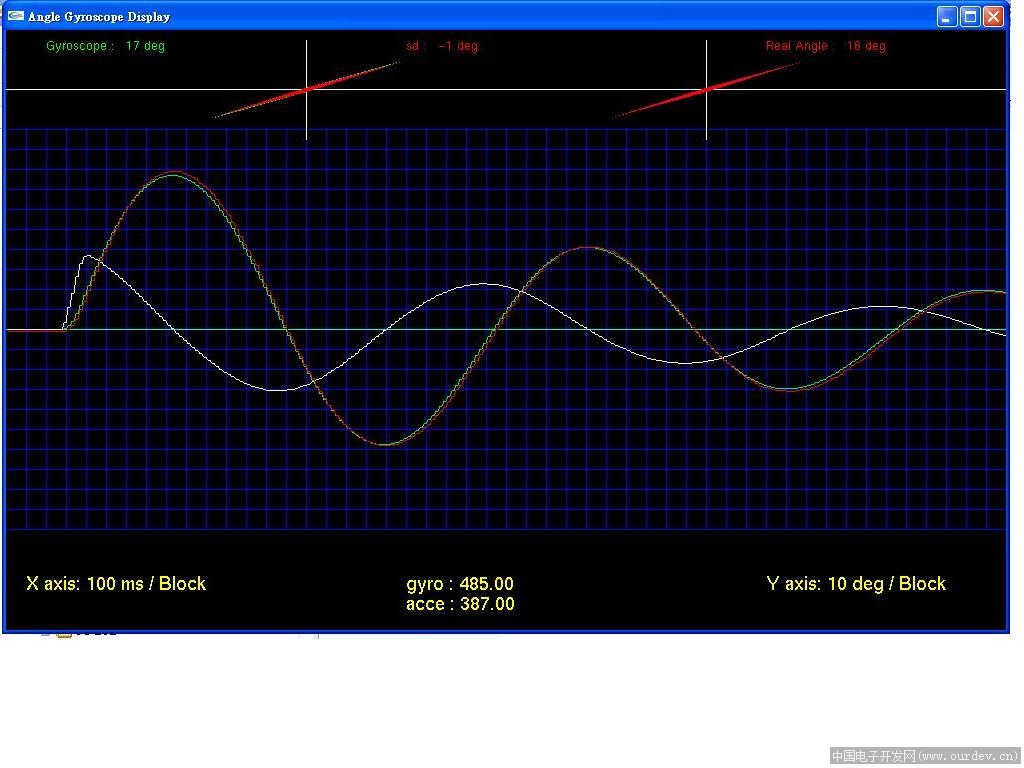
(原文件名:GYRO_002.JPG)
4. GPS模组目前用U-BLOX 的U-CENTE 软体, 测试完成,用其MAP 功能,开车在路上可感觉是在GOOGLE 地图路的右侧, 效果不错。待测部份是用M8 取GPS 参数, 和导航功能。
目前还没飞的打算,所以机架还没做, 发表的目的是想以入门教学为主的方法来推广四轴, 用相同的平台沟通, 以解网友之苦,软硬体不一样,常常是鸡同鸭讲没有交集,爱莫能助。想解决问题, 只有测试再测试, 独测测不如众测测, 欢迎有志分享者大家一起来测测。 |
|



 发表于 2011-1-20 12:12:02
发表于 2011-1-20 12:12:02