非常感谢 MAPGPS
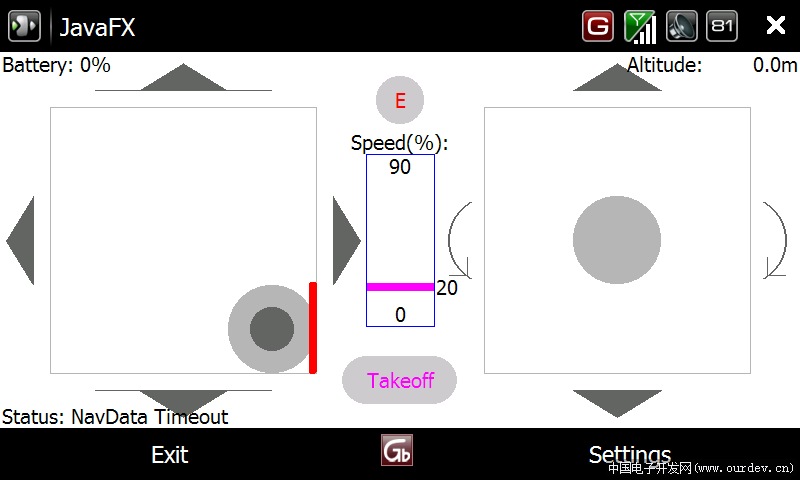
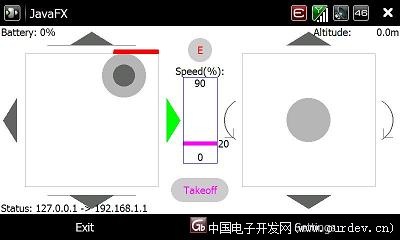
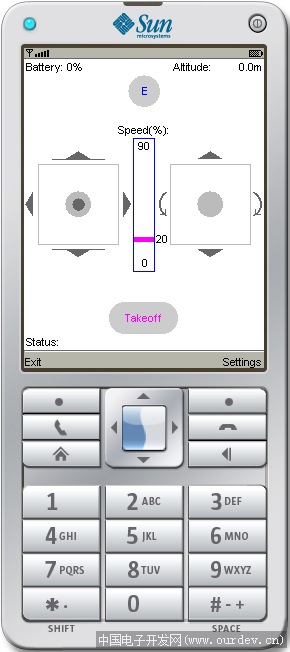
GOOD 调试OK
现在专心 看代码
定的啥协义 你自己制定的?
AT*PCMD=7661,0,0,0,0,0
AT*PCMD=7662,0,0,0,0,0
AT*PCMD=7663,0,0,0,0,0
AT*PCMD=7664,0,0,0,0,0
AT*PCMD=7665,0,0,0,0,0
AT*PCMD=7666,0,0,0,0,0
AT*PCMD=7667,0,0,0,0,0
AT*PCMD=7668,0,0,0,0,0
AT*PCMD=7669,0,0,0,0,0
AT*PCMD=7670,0,0,0,0,0
AT*PCMD=7671,0,0,0,0,0
AT*PCMD=7672,0,0,0,0,0
AT*PCMD=7673,0,0,0,0,0
AT*PCMD=7674,0,0,0,0,0
AT*PCMD=7675,0,0,0,0,0
AT*PCMD=7676,0,0,0,0,0
AT*PCMD=7677,0,0,0,0,0
AT*PCMD=7678,0,0,0,0,0
AT*COMWDG=1
AT*PCMD=7679,0,0,0,0,0
AT*CONFIG=1,"control:altitude_max","10000"
AT*CTRL=1,5,0
AT*PCMD=7680,0,0,0,0,0
AT*CONFIG=1,"control:euler_angle_max","0.2"
AT*PCMD=7681,0,0,0,0,0
AT*PCMD=7682,0,0,0,0,0
AT*CTRL=1,5,0
AT*PCMD=7683,0,0,0,0,0
AT*CONFIG=1,"control:control_vz_max","2000.0"
AT*CTRL=1,5,0
AT*PCMD=7684,0,0,0,0,0
AT*CONFIG=1,"control:control_yaw","2.0"
AT*PCMD=7685,0,0,0,0,0
AT*PCMD=7686,0,0,0,0,0
AT*CTRL=1,5,0
AT*PCMD=7687,0,0,0,0,0
AT*PCMD=1,0,0,0,0,0
AT*PCMD=7688,0,0,0,0,0
AT*CONFIG=1,"general:navdata_demo","TRUE"
AT*PCMD=7689,0,0,0,0,0
AT*CTRL=1,5,0
AT*PCMD=7690,0,0,0,0,0
AT*PCMD=7834,0,0,0,0,0
AT*PCMD=7835,0,0,0,0,0
AT*PCMD=7836,0,0,0,0,0
AT*PCMD=7837,0,0,0,0,0
AT*PCMD=7838,0,0,0,0,0
AT*PCMD=7839,0,0,0,0,0
AT*PCMD=7840,0,0,0,0,0
AT*PCMD=7841,0,0,0,0,0
AT*PCMD=7842,0,0,0,0,0
AT*PCMD=7843,0,0,0,0,0
AT*PCMD=7844,0,0,0,0,0
AT*PCMD=7845,0,0,0,0,0
AT*PCMD=7846,0,0,0,0,0
AT*PCMD=7847,0,0,0,0,0
AT*PCMD=7848,0,0,0,0,0
AT*PCMD=7849,0,0,0,0,0
AT*PCMD=7850,0,0,0,0,0
AT*PCMD=7851,0,0,0,0,0
AT*PCMD=7852,0,0,0,0,0

(原文件名:UDP.jpg)
慢慢来了 通讯OK 有借鉴的了 |



 发表于 2011-3-21 21:18:54
发表于 2011-3-21 21:18:54


 楼主
楼主





 谢谢MAPGPS
谢谢MAPGPS