|
|

楼主 |
发表于 2011-10-28 12:05:13
|
显示全部楼层
/*************************************
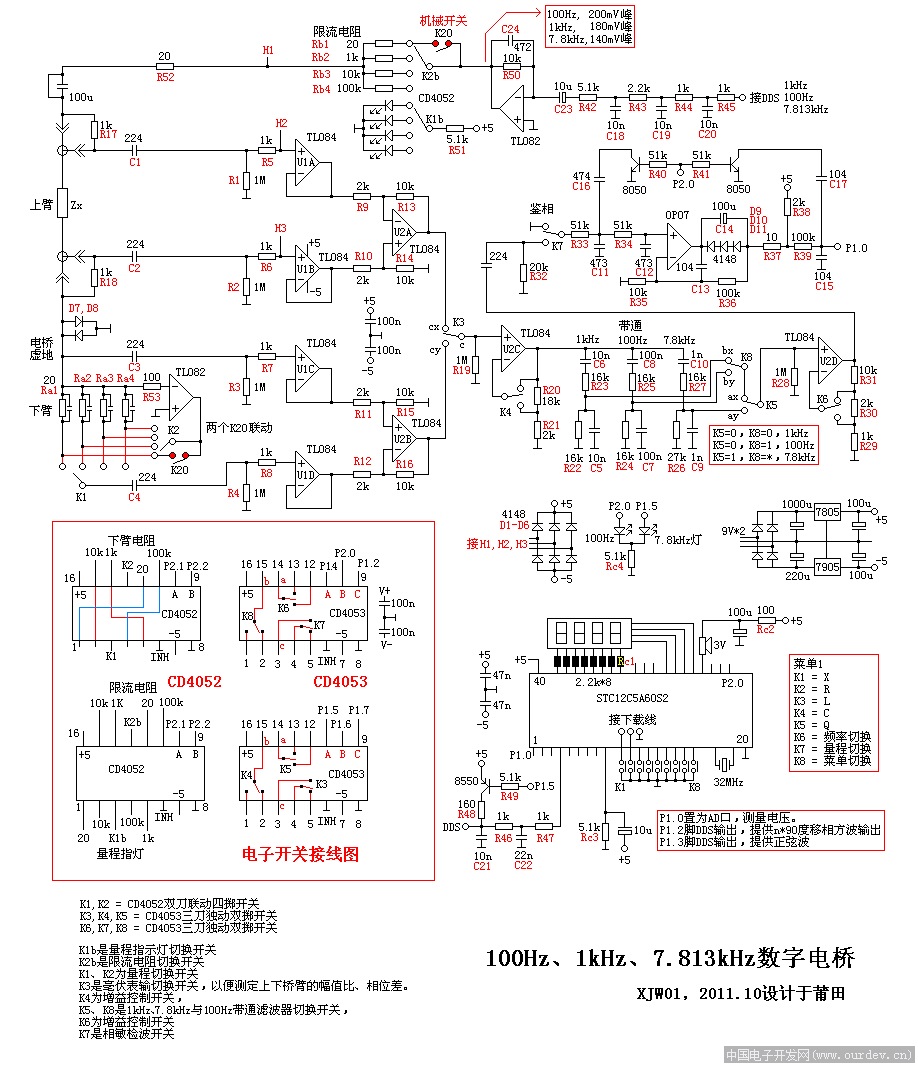
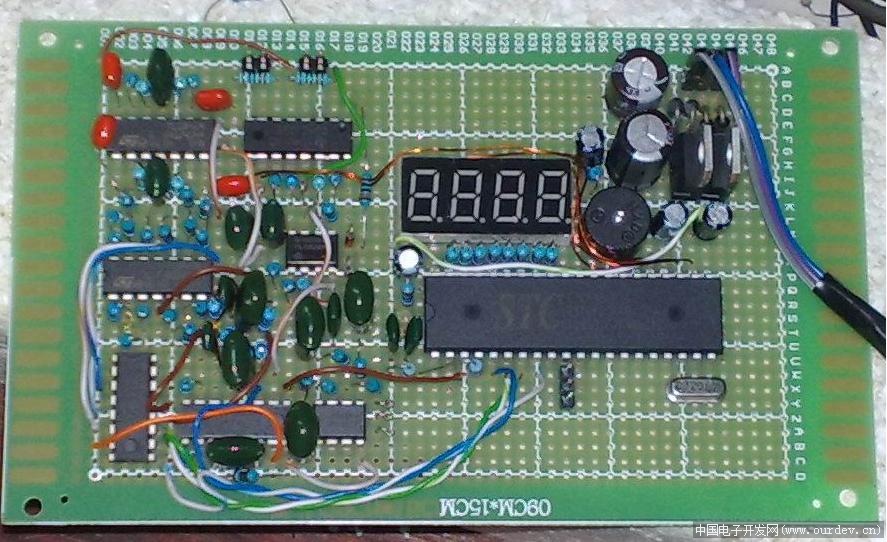
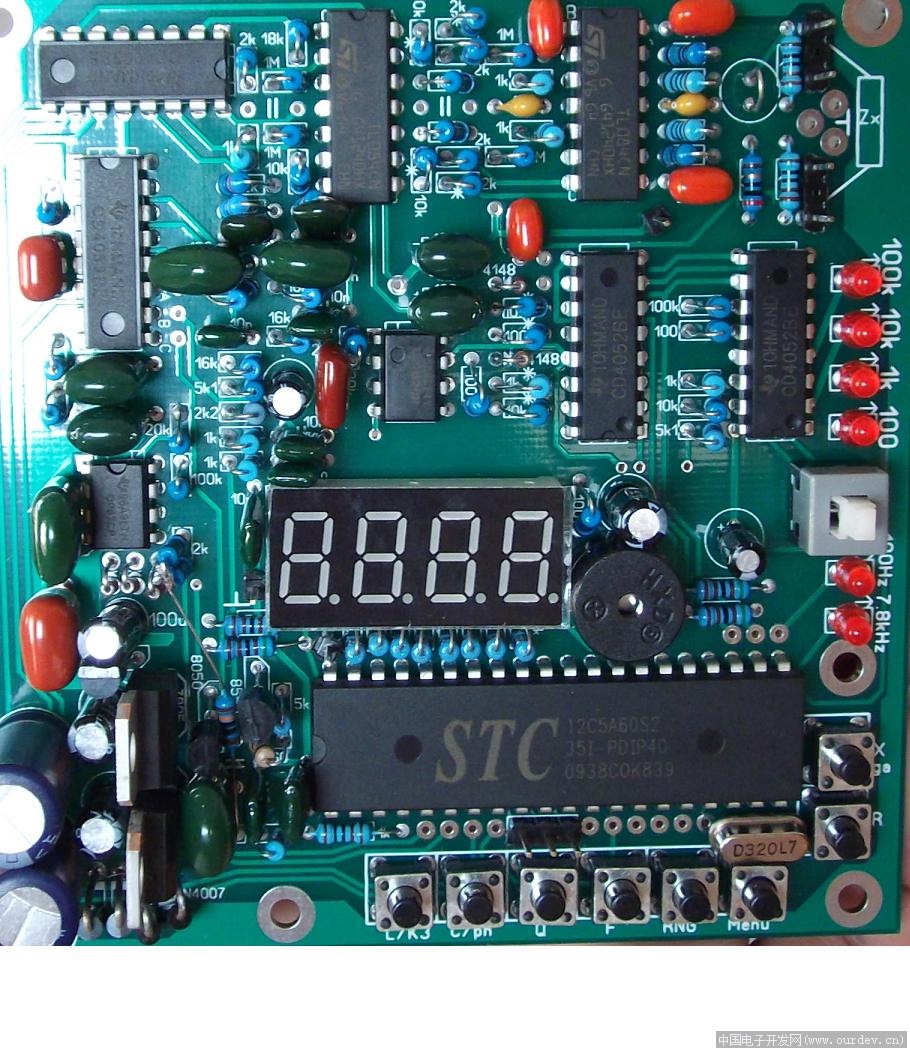
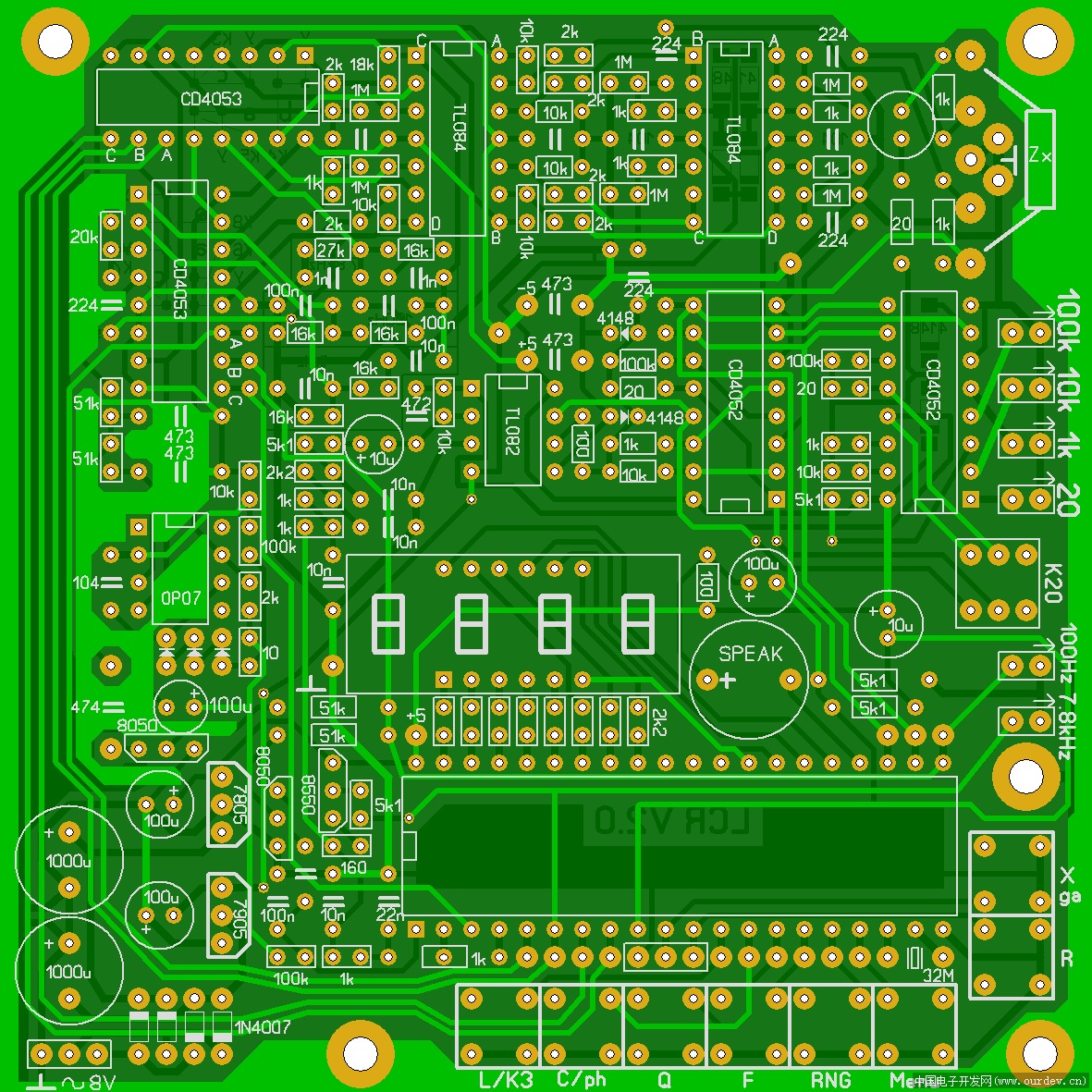
LCR表驱动程序 V1.0
xjw01 于莆田 2011.10
**************************************/
//====================================
#define uchar unsigned char
#define uint unsigned int
#define ulong unsigned long
#include <reg52.h>
#include <math.h>
void delay(uint loop) { uint i; for(i=0;i<loop;i++); } //延时函数
void delay2(uint k){ for(;k>0;k--) delay(10000); } //长延时,k=100大约对应1秒
//========================AD转换=============================
sfr P1ASF = 0x9D; //将P1置为模拟口寄存器(使能),各位中为1的有效
sfr ADC_CONTR = 0xBC; //A/D转换控制寄存器
sfr ADC_res = 0xBD; //A/D转换结果寄存器
sfr ADC_resl = 0xBE; //A/D转换结果寄存器
void set_channel(char channel){
P1ASF = 1<<channel;
ADC_CONTR = channel+128; //最高位是电源开关,低3位通道选择
delay(1); //首次打开电源应延迟,使输入稳定
}
uint getAD2(){
ADC_CONTR |= 0x08; //00001000,置ADC_START=1启动A/D 转换
while ( !(ADC_CONTR & 0x10) ); //等待A/D转换结束(ADC_FLAG==0)
ADC_CONTR &= 0xE7; //11100111,置ADC_FLAG=0清除结束标记, 置ADC_START=0关闭A/D 转换
return ADC_res*4 + ADC_resl;
}
/*
uchar get_AD(){
ADC_CONTR |= 0x08; //00001000,置ADC_START=1启动A/D 转换
while( !(ADC_CONTR & 0x10) ); //等待A/D转换结束(ADC_FLAG==0)
ADC_CONTR &= 0xE7; //11100111,置ADC_FLAG=0清除结束标记, 置ADC_START=0关闭A/D 转换
return ADC_res;
}
*/
uint getAD10() reentrant { //10次采样
char i;
uint c = 0;
for(i=0;i<10;i++) c += getAD2();
return c;
}
//============================EEPROW偏程=========================
sfr IAP_data = 0xC2;
sfr IAP_addrH = 0xC3;
sfr IAP_addrL = 0xC4;
sfr IAP_cmd = 0xC5;
sfr IAP_trig = 0xC6;
sfr IAP_contr = 0xC7;
/********************
写字节时,可以将原有数据中的1改为0,无法将0改为1,只能使用擦除命令将0改为1
应注意,擦除命令会将整个扇区擦除
*********************/
uchar readEEP(uint k){ //读取
IAP_addrL = k; //设置读取地址的低字节,地址改变才需要设置
IAP_addrH = k>>8; //设置读取地址的高字节,地址改变才需要设置
IAP_contr = 0x81; //设置等待时间,1MHz以下取7,2M以下取6,3M取5,6M取4,12M取3,20M取2,24M取1,30M取0,前导1表示许档IAP
IAP_cmd = 1; //读取值1,写取2,擦除取3,擦除时按所在字节整个扇区撺除
IAP_trig = 0x5A; //先送5A
IAP_trig = 0xA5; //先送5A再送A5立即触发
return IAP_data;
}
void writeEEP(uint k, uchar da){ //写入
IAP_data = da; //传入数据
IAP_addrL = k; //设置读取地址的低字节,地址改变才需要设置
IAP_addrH = k>>8; //设置读取地址的高字节,地址改变才需要设置
IAP_contr = 0x81; //设置等待时间,1MHz以下取7,2M以下取6,3M取5,6M取4,12M取3,20M取2,24M取1,30M取0,前导1表示许档IAP
IAP_cmd = 2; //读取值1,写取2,擦除取3,擦除时按所在字节整个扇区撺除
IAP_trig = 0x5A; //先送5A
IAP_trig = 0xA5; //先送5A再送A5立即触发
}
void eraseEEP(uint k){ //擦除
IAP_addrL = k; //设置读取地址的低字节,地址改变才需要设置
IAP_addrH = k>>8; //设置读取地址的高字节,地址改变才需要设置
IAP_contr = 0x81; //设置等待时间,1MHz以下取7,2M以下取6,3M取5,6M取4,12M取3,20M取2,24M取1,30M取0,前导1表示许档IAP
IAP_cmd = 3; //读取值1,写取2,擦除取3,擦除时按所在字节整个扇区撺除
IAP_trig = 0x5A; //先送5A
IAP_trig = 0xA5; //先送5A再送A5立即触发
}
xdata struct Ida{
char zo; //零点改正值
} cs;
void cs_RW(char rw){
uchar i,*p = &cs;
if(rw){
eraseEEP(0);
for(i=0;i<sizeof(cs);i++) writeEEP(i,p);
}else{
for(i=0;i<sizeof(cs);i++) p=readEEP(i);
}
}
/**********
字形编码图
32
-
64| | 128
- 16
1| | 8
_. 4
2
**********/
uchar code zk[20]={235,136,179,186,216,122,123,168,251,250}; //字库
uchar code zk2[8]={241,25,11,233,27,50,155,107};//p,n,u,m,0,k,M,G
uchar disp[6]={168,251,250}; char cx=-1; //显示缓存,cx光标位置
sfr P1M1=0x91; //P1端口设置寄存器
sfr P1M0=0x92; //P1端口设置寄存器
sfr P0M1=0x93; //P0端口设置寄存器
sfr P0M0=0x94; //P0端口设置寄存器
sfr P2M1=0x95; //P2端口设置寄存器
sfr P2M0=0x96; //P2端口设置寄存器
sfr P3M1=0xB1; //P3端口设置寄存器
sfr P3M0=0xB2; //P3端口设置寄存器
sbit ds3=P2^4; //数码管扫描口
sbit ds2=P2^5; //数码管扫描口
sbit ds1=P2^6; //数码管扫描口
sbit ds0=P2^7; //数码管扫描口
sbit spk=P2^3; //蜂鸣器
sbit Kb=P2^1; //量程开关B
sbit Ka=P2^2; //量程开关A
sbit DDS2=P1^2;//移相方波输出口
sbit K3=P1^7;
sbit K4=P1^6;
sbit K5=P1^5; //7.8kHz滤波开关
sbit K6=P1^4;
sbit K8=P2^0; //100Hz滤波开关
//==============字符显示函数====================
xdata uchar menu=1,menuB=1;
void cls(){ char i; for(i=0;i<6;i++) disp=0; } //清屏
void showDig(long f){ //显示数字
uchar i;
cls();
for(i=0;i<6;i++) { disp=zk[f%10], f/=10; if(!f) break; }
}
void showDig2(float f,char dw){ //显示浮点数
char i,b=0,b2=0,fh=0;
if(f<0) fh=1,f=-f;
for(i=0;i<3;i++){ if(f>=1000) f/=1000, b++; } //以3位为单位移动小数点,把大数转粉0至999,小数点在末字
for(i=0;i<4;i++){ if(f<1) f*=1000, b--; } //以3位为单位移动小数点,把小数转粉0至999,小数点在末字
for(i=0;i<3;i++){ if(f<1000) f*=10, b2++; } //对以于1000结果,连同小数点整体移位,使首位移到最左边
showDig(f);
disp[b2] += 4; //小数点
if(!dw) return;
disp[0] = zk2[b+4]; //显示单位
if(fh) disp[0] += 4; //显示符号
}
//==============低频信号DDS====================
//PCA相关寄存器
sfr CMOD = 0xD9; //钟源选择控制等
sfr CH = 0xF9; //PCA的计数器
sfr CL = 0xE9; //PCA的计数器
sfr CCON = 0xD8; //PCA控制寄存器
sfr CCPAM0 = 0xDA; //PCA模块0工作模式寄存器
sfr CCPAM1 = 0xDB; //PCA模块1工作模式寄存器
sfr CCAP0L = 0xEA; //模块0捕获寄存器低位
sfr CCAP0H = 0xFA; //模块0捕获寄存器高位
sbit PPCA = IP^7; //PCA的中断优先级设置
sbit CCF0 = CCON^0; //PCA的模块0中断标志
sbit CCF1 = CCON^1; //PCA的模块1中断标志
sbit CR = CCON^6; //PCA计数器使能
void PWM_init(){ //把PCA置为PWM
CMOD = 2; //0000 0010 计数源选择,钟源取fosc/2
CL = CH = 0;
CCAP0L = CCAP0H = 192; //占空比为25%
//CCPAM0=0x42;//0100 0010,PCA的模块0设置为PWM模式,无中断
CCPAM0=0x53;//0101 0011,PCA的模块0设置为PWM模式,有中断,下降沿中断
PPCA = 1; //优先中断
//CR = 1; //开始计数
EA = 1; //开总中断
}
uint ph=0, phM=256, feq=1000; //相位,phM相位步进值
uchar code sinB[256]={
//查询表中不可装载零值,否则会造成无中断产生
255,255,255,255,255,255,254,254,253,252,252,251,250,249,248,247,246,245,243,242,240,239,237,236,234,232,230,229,227,225,222,220,
218,216,214,211,209,206,204,201,199,196,194,191,188,185,183,180,177,174,171,168,165,162,159,156,153,150,147,144,140,137,134,131,
128,125,122,119,116,112,109,106,103,100, 97, 94, 91, 88, 85, 82, 79, 76, 73, 71, 68, 65, 62, 60, 57, 55, 52, 50, 47, 45, 42, 40,
38, 36, 34, 31, 29, 27, 26, 24, 22, 20, 19, 17, 16, 14, 13, 11, 10, 9, 8, 7, 6, 5, 4, 4, 3, 2, 2, 1, 1, 1, 1, 1,
1, 1, 1, 1, 1, 1, 2, 2, 3, 4, 4, 5, 6, 7, 8, 9, 10, 11, 13, 14, 16, 17, 19, 20, 22, 24, 26, 27, 29, 31, 34, 36,
38, 40, 42, 45, 47, 50, 52, 55, 57, 60, 62, 65, 68, 71, 73, 76, 79, 82, 85, 88, 91, 94, 97,100,103,106,109,112,116,119,122,125,
128,131,134,137,140,144,147,150,153,156,159,162,165,168,171,174,177,180,183,185,188,191,194,196,199,201,204,206,209,211,214,216,
218,220,222,225,227,229,230,232,234,236,237,239,240,242,243,245,246,247,248,249,250,251,252,252,253,254,254,255,255,255,255,255
};
uchar code fbB[256]={ //方波DDS查询表
0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,
1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,
1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,
1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,
1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1
};
uchar chuX=0; //方波DDS初相
void PCAinter(void) interrupt 7 {//PCA中断
uchar x,y;
CCF0=0; //清除中断请求,以免反复中断
x = ph >> 8; //截断正弦相位累加器,取高8位
y = x + chuX; //方波相位
CCAP0H = sinB[x];//正弦DDS输出
DDS2 = fbB[y]; //方波DDS输出
ph += phM; //相位累加
}
void setDDS(uint f){ //参考时钟是c=(fosc/2)/256=32000000/2/256=62500,频率f=c*phM/2^16
feq = f;
phM=f*65536.0/62500; //phM=f*2^16/62500
ph = 0; //高频时,使波形对称
if(!f) CR=0; else CR=1;
}
//相位控制函数
xdata char xw=0; //相位
void set90(char k){ //设置方波的相位差
k %= 4;
if(k<0) k += 4;
if(k==0) chuX=0; //移相0度
if(k==1) chuX=128; //移相180度
if(k==2) chuX=64; //移相90度
if(k==3) chuX=192; //移相270度
xw = k;
}
void set902() { set90(xw+1); } //相位步进
//==============量程控制函数====================
xdata char rng=1; //量程
void setRng(char k){//切换量程
if(k==0) Ka=0,Kb=0; //100欧
if(k==1) Ka=0,Kb=1; //1k欧
if(k==2) Ka=1,Kb=0; //10k欧
if(k==3) Ka=1,Kb=1; //100k欧
rng = k;
}
void setRng2(){ setRng( (rng+1)%4); } //量程步进
//==============增益控制函数====================
float gain[4]={1,3,10,30}; //增益表
char curGain=1; //当前增益索引号
void setGain(char k){ //设置电路增益
if(k>3) k=3;
if(k<0) k=0;
if(k==0) K4=0,K6=0; //1倍
if(k==1) K4=0,K6=1; //3倍
if(k==2) K4=1,K6=0; //10倍
if(k==3) K4=1,K6=1; //30倍
curGain = k;
}
void setGain2(){ setGain((curGain+1)%4); }
//==============设置频率====================
uchar mT = 6; //测量速度
void setF(char k){
if(k==-1){ //步进
k = 0;
if(feq==100) k=1;
if(feq==1000) k=2;
if(feq==7813) k=0;
}
if(k==0) { setDDS(100); K5=0; K8=1; mT=15; } //置为100Hz
if(k==1) { setDDS(1000); K5=0; K8=0; mT=6; } //置为1kHz
if(k==2) { setDDS(7813); K5=1; K8=0; mT=6; } //置为7.8125kHz
}
//==============LCR测量====================
xdata int Vxy[4]={0,0,0,0}; //Vxy[Vx1,Vy1,Vx2,Vy2]
xdata char Vga[4]={1,1,1,1}; //上下臂增益记录表
xdata uchar tim=0,tims=0;
xdata char pau=0; //暂停坐标自动旋转
int Vfull = 9500;
code float dwR[4]={20,1000,10000,100000}; //档位电阻表
int absMax(int a,int b){
a=abs(a);
b=abs(b);
if(b>a) a=b;
return a;
}
void timerInter1(void) interrupt 3 {//T1中断
char a,g; int c;
static int Ve0=0;
if(pau) return;
tims++;
if(tims>=mT){ //tim进位触发
tims = 0, tim++;
if(tim>=8) tim=0;
a = tim/2; //x1,y1,x2,y2指针
c = getAD10() + cs.zo; //读取电压值
if(tim%2){
if(Ve0>c) Vxy[a] = Ve0; //保存当前电压
else Vxy[a] = -c;
Vga[a] = curGain; //保存当前增益
}else Ve0 = c;
if(tim==3||tim==7){ //上下臂切换
//电压模值才能反应运放的输出幅度,所以增益切换判断得用模值
if(tim==3) K3=1, c = absMax(Vxy[2],Vxy[3]), g=Vga[2]; //切换到下臂
if(tim==7) K3=0, c = absMax(Vxy[0],Vxy[1]), g=Vga[0]; //切换到上臂
//切换后一定要设定一个g值,不论c为何值
setGain(g);
if(c>Vfull) setGain(g-1);
if(c<Vfull/33*10) setGain(g+1);
if(c<Vfull/33*3) setGain(g+2);
if(c<Vfull/33*1 ) setGain(g+3);
}
set90(tim+1); //相位旋转
}
}
char sfdw=1; //是否显示单位
void showR(char xm){ //显示电阻
xdata float a,b,c,e,bs;
xdata float x1 = Vxy[0]/gain[Vga[0]];
xdata float y1 = Vxy[1]/gain[Vga[1]];
xdata float x2 = -Vxy[2]/gain[Vga[2]];
xdata float y2 = -Vxy[3]/gain[Vga[3]];
bs = dwR[rng];
a = x2*x2+y2*y2;
b = x1*x2+y1*y2;
c = x2*y1-x1*y2;
if(!a) { cls(); disp[3]=115;disp[2]=disp[1]=97; return; }
if(xm==0){ showDig2(c/a*bs,sfdw); }//显示X值
if(xm==1){ showDig2(b/a*bs,sfdw); }//显示R值
if(xm==2){ showDig2(c/a*bs / 6.283/feq, sfdw); }//显示L值
if(xm==3){ showDig2(a/c/bs / 6.283/feq, sfdw); }//显示C值
if(xm==4||xm==9){ //显示Q值
if(!b) { showDig(9999); return; }
c = fabs(c/b);
if (c>=1000) { showDig(999 ); }
else if(c>=100 ) { showDig(c ); }
else if(c>=10 ) { showDig(c*10 ); disp[1] += 4; }
else if(c>=1 ) { showDig(c*100 ); disp[2] += 4; }
else { showDig(c*1000); disp[3] += 4; }
}
e = (b*b+c*c)/a;
if(xm==5){ showDig2(e/c*bs,sfdw); }//显示并联X值
if(xm==6){ showDig2(e/b*bs,sfdw); }//显示并联R值
if(xm==7){ showDig2(e/c*bs / 6.283/feq,sfdw); }//显示并联L值
if(xm==8){ showDig2(c/e/bs / 6.283/feq,sfdw); }//显示并联C值
}
//void timerInter(void) interrupt 1 {}//T0中断
void showMsg(uchar a){ //临时跳出信息
P0 = ~a;
ds0=1, ds1=ds2=ds3=0;
delay2(50);
}
main(){
uchar i=0,kn=0,key=0;
uchar dispN=0; //显示扫描索引
uchar spkN=0; //蜂鸣器发声时长
uchar nn=0;
uchar XRQ=1;
delay2(40); //启动延时
cs_RW(0); //读EEPROM
TCON=0, TMOD=0x12; //将T0置为自动重装定时器,T1置为定时器
TH1 = 47, TL1 = 171; //20ms秒定时
TR1=1; //T1开始计数
TR0=0; //T0暂停计数
ET1=1; //T1开中断
ET0=1; //T1开中断
EA=1; //开总中断
PT0=1; //设置优先级
set_channel(0); //设置AD转换通道
P2M0 = 0xFF; //P2.01234567置为推勉输出
P1M0 = 0xFC; //P1.234567置为推换口
P1M1 = 0x03; //P1.0置为高阻抗
//请注意启动延时0.5秒方可读取cs_RW
//cs_RW(0); //读取比值基数(调零时已做开机延时,确保电压上升到可读取EEPROW)
PWM_init();//DDS初始化
set90(2); //初始设置相位
setRng(1); //初始设置量程
setGain(1); //初始设置增益
setF(1); //DDS初始设置为1kHz
while(1){
//显示disp
nn++;
dispN=(++dispN)%4; //扫描器移动
ds0=ds1=ds2=ds3=0;
if(dispN==0) ds0=1;
if(dispN==1) ds1=1;
if(dispN==2) ds2=1;
if(dispN==3) ds3=1;
P0=~disp[dispN]; //显示
//扫描键盘
//键盘响应
//key = (~P3)&0xfc;
key = ~P3;
if(key&&kn<255) kn++; else kn=0;
for(i=0;key;i++) key/=2; key=i;
if(kn==20) spkN=50; else key=0; //当按下一定时间后,key才有效,否则无效。spkN发声时长设置
if(spkN) spkN--, spk=0; else spk=1; //键盘发声
//菜单系统
if(key==8 && menu) { menuB=menu, menu=0; key=0; XRQ=-1;} //菜单键
if(key==7 && menu) setRng2(); //量程步进
if(key==6 && menu) setF(-1); //设置频率
if(menu==0){ //显示量程和菜单
showDig(menuB);
if(key==8) menu = menuB;
if(key>=1 && key<=7) menu = key;
key = 0;
}
if(menu==1||menu==2){ //自动LCR测量(串联)
pau = 0;
if(XRQ==-1) XRQ=1, sfdw=1;
if(key>=1&&key<=5){ //扩展一位显示
if(key-1==XRQ) { if(sfdw==0) sfdw = 1; else sfdw = 0; }
else sfdw = 1;
XRQ = key-1; //X,R,L,C,Q
}
if(key>=1&&key<=5) XRQ = key-1; //X,R,L,C,Q
if(menu==1) showR(XRQ);
else showR(XRQ+5);
}
if(menu==3){ //手动调试
pau = 1;
if(key==1) { setGain2(); showMsg( zk[curGain] );} //增益控制
if(key==2) { };
if(key==3) { K3=~K3; showMsg(zk[K3]); } //切换上下臂
if(key==4) { set902(); showMsg(zk[xw]); } //相位旋转
if(nn%64==0) showDig( getAD10());
}
if(menu==7){ //设置零点偏移数
if(key==1) cs.zo += 5; //X键加5
if(key==2) cs.zo -= 5; //R键减5
if(key==3) cs_RW(1); //L键保存
if(key==4) cs.zo = 0; //C键清除
showDig(abs(cs.zo));
disp[1] += 4;
if(cs.zo<0) disp[3] = 16;
}
delay(4000);
}//while end
} |
|
 [复制链接]
[复制链接]



 发表于 2011-10-27 19:18:36
发表于 2011-10-27 19:18:36