|
|
 发表于 2009-11-23 21:18:54
|
显示全部楼层
发表于 2009-11-23 21:18:54
|
显示全部楼层
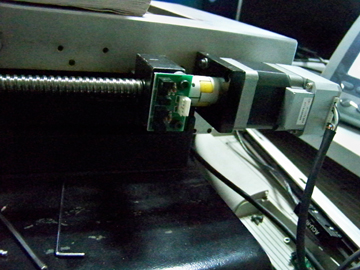
楼主想做3轴闭环的控制卡:我推荐您一个方案
MCU(简单的那种就可以了)+TMC428(3轴控制芯片)+3*TMC249(步进驱动芯片)+TMC423(3轴编码器反馈)+3个MOTOR
这个方案也不需要做太多算法,而且外部电路很简单,可以把3个电机的控制+驱动+反馈集成到一个PCB板上
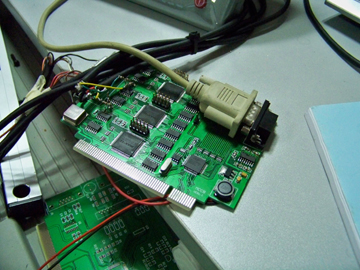
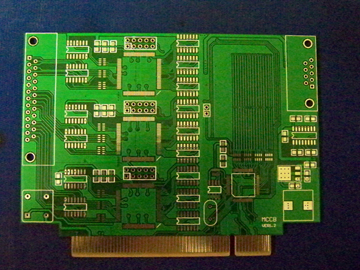
上传一个之前已经开发好的卡:
(原文件名:整体.gif)
(原文件名:3.gif)
型号 性能
控制芯片
TMC211 1个步进控制+驱动芯片 LIN通讯
TMC222 1个步进控制+驱动芯片 IIC通讯
TMC223 1个步进控制+驱动芯片 IIC通讯 StallGuard功能
TMC428 3个电机控制芯片;SPI或step/dir控制信号
TMC454 位置闭环芯片,PID功能,ABN编码器输入,微步406,classic/SPI/SD
TMC457 位置闭环芯片,PID功能,ABN编码器输入,微步2048;classic/SPI/SD
TMC401 信号转化芯片 SPI---STEP/DIR;42细分
编码器信号处理芯片
TMC423 3路ABN编码器处理芯片
步进驱动芯片
TMC236 2相步进驱动芯片;1.5A;64细分;齐全的保护和诊断功能
TMC239 2相步进驱动芯片;MOSFETS外置;64细分;齐全的保护和诊断功能
TMC246 2相步进驱动芯片;1.5A;64细分;齐全的保护和诊断功能; 具有专利技术StallGuard技术
TMC249 2相步进驱动芯片;MOSFETS外置;64细分;齐全的保护和诊断功能;具有专利技术StallGuard技术
3相步进驱动芯片
TMC332 适用2相或3相步进电机;自动高速;运动平稳;细分数2相256细分,3相171细分;S/D接口;ABN编码器输入
无传感器直流无刷驱动芯片
TMC603 3相BLDC;20A;12-50V;无需Hall换向
详细资料及参考电路 详细资料及参考电路
TMC211 http://www.trinamic.com/tmc/render.php?sess_pid=209
TMC222 http://www.trinamic.com/tmc/render.php?sess_pid=222
TMC223 http://www.trinamic.com/tmc/render.php?sess_pid=223
TMC428 http://www.trinamic.com/tmc/render.php?sess_pid=428
TMC454 http://www.trinamic.com/tmc/render.php?sess_pid=454
TMC457 http://www.trinamic.com/tmc/render.php?sess_pid=457
TMC401 http://www.trinamic.com/tmc/render.php?sess_pid=401
TMC423 http://www.trinamic.com/tmc/render.php?sess_pid=423
TMC236 http://www.trinamic.com/tmc/render.php?sess_pid=236
TMC239 http://www.trinamic.com/tmc/render.php?sess_pid=239
TMC246 http://www.trinamic.com/tmc/render.php?sess_pid=246
TMC249 http://www.trinamic.com/tmc/render.php?sess_pid=249
TMC332 http://www.trinamic.com/tmc/render.php?sess_pid=332
TMC603 http://www.trinamic.com/tmc/render.php?sess_pid=603 |
|


 楼主
楼主