|
|
最近飞四轴让我很是痛苦,因为我用飞固定翼的方式来控制油门,四轴就像兔子一样上窜上跳。等XAircraft 出超声波功能等了很久也没出来,还是自己动手写一个通用的超声波模块吧,估计不会很难。
想了一下需求大概是这样的 :
1. 可以由单片机完全控制油门, 我只控制四轴的水平运动就行。
2. 可以用控的一个2段开关,来开启和关闭超声波定高, 开启后, 四轴将悬停在当前的高度。
3. 用另外一个开关,能自动起飞, 自动降落。
4. 能兼容大部分的四轴飞控(FS1212,KK,AQ50D之类),因为接管了接收机的油门通道
在开始之前我设想了一些问题,后来在实际测试中进行了验证和修正。
1.超声波是否会被电机干扰?
实际测试后,超声波并不会被电机发出的声音影响。但很容易被紧贴在旁边的电池反射产生了干扰,所以超声波传感器得找一个周围至少有2-3cm间隔的地方放置。尽管如此,超声波在临界点时返回的数据一定会有噪点,我们得用kalman 过滤一次。
2.pid 如何实时查看output 。
方案一,用电脑上的 processing写一个波形显示程序。方案二,用anroid 写一个手机上的示波器,android sdk2以上可以使用蓝牙SDK, 再用一片20元的蓝牙芯片放在飞控上,就可以让飞控和手机通讯了。
3. PID 中比例,微分,积分的整定。
这三个参数需要在外场实际测试中调试,通讯链路是双向的,自订个协议设置参数没多大问题。遇到的困难是,在一些极端参数下,估计会产生巨大的不可控震荡,简单的说四轴会拔地而起,或者重重的高速撞击地球。暂时没想到好的办法防止这些情况,用绳子拴着?
4.pid output 用什么策略映射到 pwm
方案一是直接将输出映射到1000-2000 的脉宽,这样手动的油门将不参与控制
方案二,基于任何时候都不能相信机器人的理由,要将当前的油门值进行数据融合
5.开启pid 的策略
用遥控器的一个2档开关,开关拨到开启时,记录这瞬间的pwm和高度,作为setpoint。
6.超声波的异常处理,距离检测到 0 ,或很大的情况,距离突然变化的情况。
超声波必须要做卡尔曼滤波,在这些特殊情况下应该关闭定高功能,自动缓慢降落。
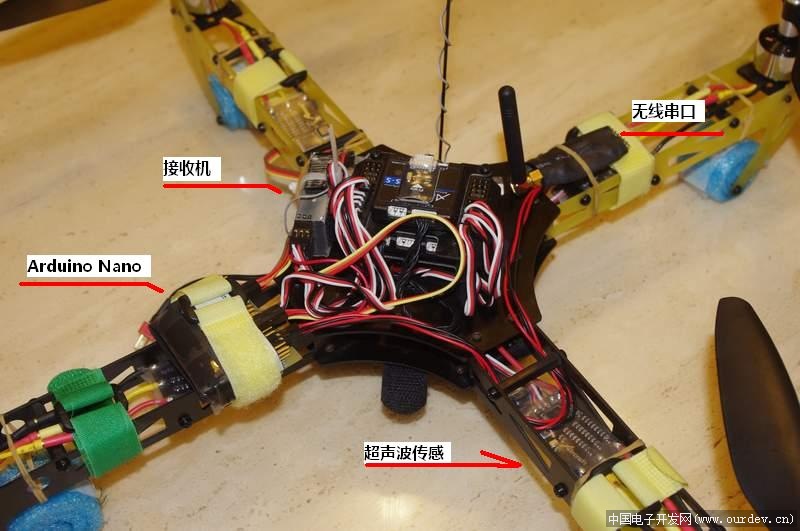
(原文件名:机架布局.jpg)
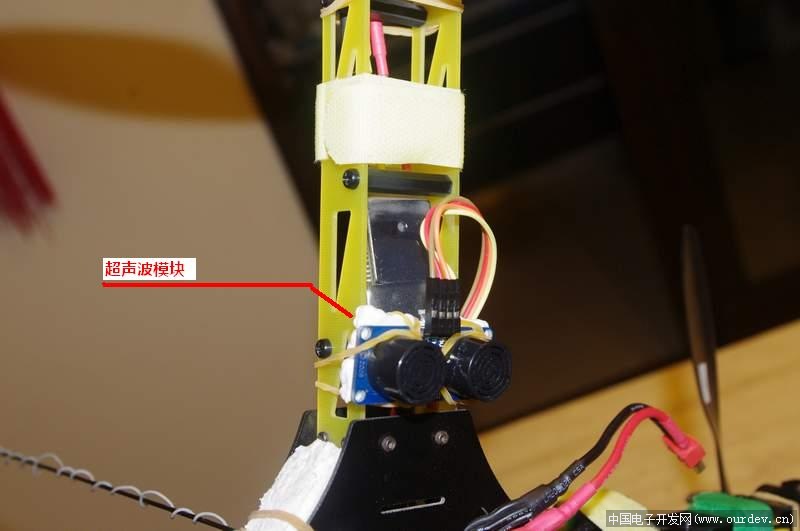
(原文件名:超声波特写.JPG)
算法早已写完,连续两个星期都没有时间去外场实际验证效果, kp ,ki ,kd 在家基本没法整定。
今天虽然有些小雨,也去了华农体育场,带了手提电脑和无线串口,直接用无线来修正单片机上的参数,大概调整了10来组,就已经很好飞了。我的控是美国手,四轴是x450,最后我的左手完全解放了,只用右手控制四轴前后左右就行了。帮我一起调整参数的朋友cn,从来没有飞过航模,开启锁定航向+超声波定高,让他飞了十来分钟下来说:太没挑战了,太无聊了。话没说完就倾盆暴雨,只好收工回家,改日再战。

(原文件名:PID整定.JPG)
经过实际外场测试,整定出PID 参数如下, 震荡已经很小了。
#define IMU_SAMPLE_RATE 1.0/16 // 16k Hz
Kalman kalman_ym(IMU_SAMPLE_RATE, 0.002 , 0.003 , 0.001 ); //油门卡尔曼
Kalman kalman_dt(IMU_SAMPLE_RATE, 0.002 , 0.003 , 0.001 ); //高度卡尔曼
int pinCSBin = 10;
int pinCSBout = 11;
//Define Variables we'll be connecting to
double Setpoint, Input, Output;
PID myPID(&Input, &Output, &Setpoint, 2 , 0.5 , 1 , DIRECT); // 最后整定出来的kp,ki,kd
这是运行在电脑上,用无线进行调整pid参数,这样就不用重新编译和上传程序到单片机了。
绿色线是目标高度
红色线是当前高度
蓝色是经过pid运算后修正的油门值
接下来,上制作教程: 程序也分享给大家,你可以随意下 载烧录。
一 。首先你得淘宝以下器件:
1. arduino uno/nano/mini/pro 都可以。(我一开始用了一片stm32f103RB,但这开发板挺贵而且没有电子基础的人upload都很困难,觉得没必要了,换成最容易买到的avr)
2.超声波传感器 (一搜一大把,几十块钱吧,我用的是5米距离的)
二。然后将arduino 的pin 2 接到 接收机的 3通道(油门), 将pin3 接到接收机的5通道 (2段开关) 。 将arduino 的pin4 (油门输出) 接到飞控的1通道 (油门输入)
三。下 载程序,用usb烧录到芯片里去。
四。有必要的话调整一下参数,不调就用我设定好的。
然后,然后,打开care free+ 超声波定高,你会觉得飞四轴变得很无聊。
点击此处下载 ourdev_638239J87UEB.rar(文件大小:10K) (原文件名:四轴超声波定高代码.rar) |
阿莫论坛20周年了!感谢大家的支持与爱护!!
一只鸟敢站在脆弱的枝条上歇脚,它依仗的不是枝条不会断,而是自己有翅膀,会飞。
|
 [复制链接]
[复制链接]


 发表于 2011-5-8 13:44:26
发表于 2011-5-8 13:44:26
 楼主
楼主



 好玩
好玩 那是不是头顶也要装一个防止撞头啊。。
那是不是头顶也要装一个防止撞头啊。。