|
|
我们都知道CAN性能应该是优于485的,实际比较的结果是什么样呢?
我先放点找到的资料,大家一起讨论讨论
CAN
CAN Versions
NOMENCLATURE STANDARD MAX. SIGNALING RATE IDENTIFIER
Low–Speed CAN ISO 11519 125 kbps 11-bit
CAN 2.0A ISO 11898:1993 1 Mbps 11-bit
CAN 2.0B ISO 11898:1995 1 Mbps 29-bit
Maximum Signaling Rates for Various Cable Lengths
BUS LENGTH(m) SIGNALING RATE(kbps)
30 1000
100 500
250 250
500 125
1000 62.5
The ISO 11898 standard specifications are given for a maximum bus length of 40 m and
maximum stub length of 0.3 m with a maximum of 30 nodes. However, with careful design,
longer cables, longer stub lengths, and many more nodes can be added to a bus—always with a
trade-off in signaling rate. A transceiver with high input impedance such as the HVD230 is
needed to increase the number of nodes on a bus.
485
Standard and Features
RS-485 is an electrical-only standard. In contrast to complete interface standards, which define the
functional, mechanical, and electrical specifications, RS-485 only defines the electrical characteristics of
drivers and receivers that could be used to implement a balanced multipoint transmission line.
This standard, however, is intended to be referenced by higher level standards, such as DL/T645, for
example, which defines the communication protocol for electronic energy-meters in China, specifying
RS-485 as the physical layer standard.
Key features of RS-485 are:
· Balanced interface
· Multipoint operation from a single 5-V supply
· –7-V to +12-V bus common-mode range
· Up to 32 unit loads
· 10-Mbps maximum data rate (at 40 feet)
· 4000-foot maximum cable length (at 100 kbps)

(原文件名:422485.JPG)
再放两个CAN和485芯片的资料对比
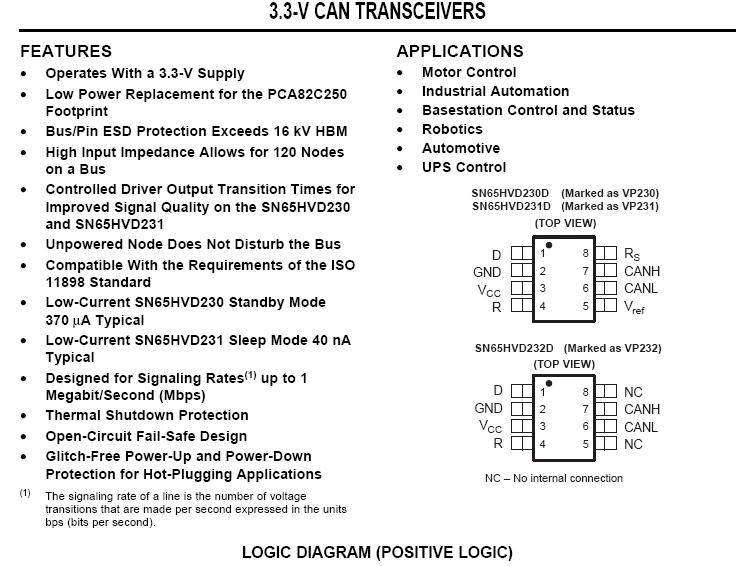
(原文件名:230.JPG)
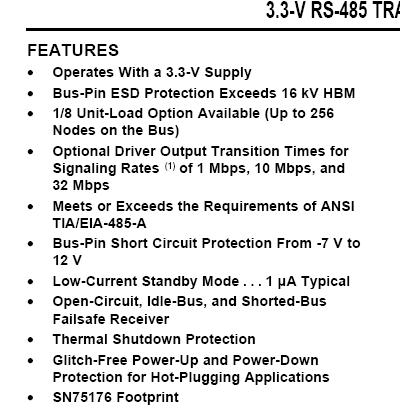
(原文件名:485.JPG)
(以上资料均来自 TI 德州仪器,www.ti.com.cn)
-----------------------------------------------------------------
个人的一些评论,
CAN和485采用基本相同的传输方式,一样的差分传输,相近的差分信号电平。所以在传输速率、传输长度上应该也不会有本质上的大变化。
也就是说,对于数据通讯本身,485和CAN是差不多的。
CAN增加了识别码、以及硬件的保护,这个对于CAN网络的易用性有明显的提高。485需要软件协议参与,才能做到识别码、多主多从。
这方面而言,CAN确实有优势。
总体评价,在数据传输本身,CAN相比485基本差不多,在数据传输之外,CAN增加了不少辅助的东西。 |
|


 发表于 2008-5-21 08:06:30
发表于 2008-5-21 08:06:30
 楼主
楼主