|
|
继续为GPS开源活动添砖加瓦。 这次主要回顾一下GPS在车辆导航系统的应用,并对GPS乃至GNSS在这个领域的一些趋势做一下展望。
1.传统的车载导航
传统的车载导航,主要使用GPS接收机作为车辆定位信息的唯一提供者。目前市场上的大多数产品都属于这个范畴。 比如Garmin,Tomtom。 这类产品主要使用GPS模块加上ARM处理器,配以电子地图和路径搜索方法,达到导航的目的。

Garmin (原文件名:Garmin.jpg)

Tomtom (原文件名:Tomtom.jpg)
局限
这类产品通常使用廉价的GPS接收机,有相对较低的成本(较后面所述的系统),但其定位精度和可靠性将大打折扣。 这主要是由于GPS的先天性缺陷造成的。GPS卫星在地球上空约20000公里的轨道上运行,卫星信号会受到电离层,对流层的影响,在其到达地面时,信号强度将低于噪声平面。接收机通过解扩,延长积分时间,来提高信噪比,从而完成信号的解调和观测量的生成。 但是在城市,一方面信号会受到建筑物的遮挡,另一面信号衰减也很严重,使得很多情况下接收机很难有4颗卫星的观测量用以定位,即便接收到足够数目的卫星信号,由于多径效应的影响,反射的信号将严重影响接收机对line of sight(视线) 信号接收时间的判断,从而使得定位解算产生较大的误差。
Map Match 地图匹配
为了在不增加成本的情况下,尽量提高接收机在城市环境下的性能,一些接收机,如Garmin和Tommom,使用地图匹配的方法,校正定位信息。 比如根据定位结果,判断接收机所在车辆可能在某条道路上行驶,这时即便真实定位结果已经偏离道路,甚至可能在建筑物上,但是算法将强制把定位结果拉回道路上。关于map match的相关内容可以参见【1】。
2.GPS/INS(Inertial Navigation System:惯性导航系统) 组合导航
由于GPS的种种限制,使得组合导航系统应运而生。 惯性导航系统是一种自主导航系统,他不依赖外界信息,采用航迹推算(Dead Reckoning)的方法得到位置信息。惯性导航系统中,给定车辆的初始状态,如位置,速度,姿态信息,使用陀螺仪测得角速度,积分后得到角度增量,从而计算出新的姿态;加速度计用来测量运动体的加速度经过对时间的一次积分得到速度,速度再经过对时间的一次积分即可得到距离。但是惯导传感器通常伴随着偏差(bias)和漂移(drift),在长时间的推算和积分过程中,使得系统的误差越来越大。 但是GPS的精度却不随时间长短而变化,GPS的位置和速度信息可以矫正惯导系统的误差。而惯导系统可以在GPS信号条件差的情况下,继续提供可靠的导航信息。这样GPS/INS组合导航系统,弥补了单纯GPS或INS的缺陷,提高了导航系统的精度和可靠性。NoAtel的SPAN系统就是这样的系统。关于组合导航的内容,大家可以参考【2】.这类产品主要由NovAtel SPAN。由于使用的全维的惯导系统(3轴的陀螺,3轴的加表),成本比较高。 适合于高端应用,如一些测绘用车辆。

NoAtel SPAN System (原文件名:SPAN.jpg)
3.GPS/Vehicle Sensor(车辆传感器)
由于全维的惯导系统,成本高,无法在民用系统中普及,即便随着MEMS(Micro-Electro-Mechanical Systems:微机电系统)系统的发展,MEMS 陀螺的价格依然较高。 所以基于GPS和车辆传感器的组合导航系统成为一种趋势。 车辆传感器,主要由2D的惯导系统(Reduced INS),里程计(odometer or wheel speed sensor),方向盘转角传感器等组成。 由于现代车辆对安全性和稳定性的要求,这类车辆传感器已经广泛应用于车辆的稳定性控制上。如笔者使用GMC,SUV。使用一定的传感器融合算法,将有效的弥补GPS的一些缺陷。 如ublox的 Automotive Dead Reckoning solutions已经使用了这种技术。使用CAN总线将传感器信息送入组合导航系统,组合导航系统负责融合GPS和传感器的信息,得到最终可靠的定位信息。 这也将是今后车载导航的发展趋势,使用高灵敏度接收机,辅助以车辆中现有的车辆传感器,配和上有效的如何算法,使得廉价可靠的车载导航系统成为可能。更多的关于GPS、车辆传感器组合的信息可参考【3】,【4】,【5】。
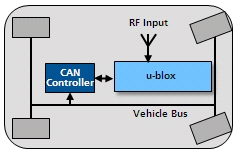
(原文件名:ublox2.jpg)
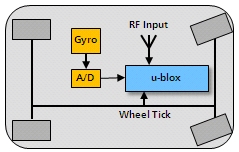
uBlox Dead Reckoning (原文件名:uBlox.jpg)
【1】 Current map-matching algorithms for transport applications: State-of-the art and future research directions Mohammed A. Quddus a, Washington Y. Ochieng b,*, Robert B. Noland b。http://cens.ucla.edu/~mhr/cs219/maps/quddus08_map_matching.pdf
【2】GPS/INS组合导航定位及其应用,董绪荣,国防科技大学出版社
【3】http://www.u-blox.com/en/dead-reckoning.html
【4】Niu, X., Nassar, S. and El-Sheimy, N., An Accurate Land-Vehicle MEMS IMU/GPS Navigation System Using 3D Auxiliary Velocity Updates, NAVIGATION, USA., vol 54, no 3, pp.177-188
【5】Li, T., M.G. Petovello, G. Lachapelle and C. Basnayake (2010) Ultra-tightly Coupled GPS/Vehicle Sensor Integration for Land Vehicle Navigation, Navigation, Vol. 57, No. 3, Fall 2010, http://plan.geomatics.ucalgary.ca/papers/navigation_li%20et%20al_15jun10_web.pdf |
|


 发表于 2010-7-14 04:24:22
发表于 2010-7-14 04:24:22
 楼主
楼主
