|
|

楼主 |
发表于 2010-9-20 10:54:18
|
显示全部楼层
首先,我自我批评一下,实际上我在0楼提出的问题是不太确切的,他反映出一个GPS初学者的水平.
斗胆提一点23楼回复的美中不足的地方:
1. 0楼提出的问题不言而喻,是针对我们常见的商品接收机,而不是很多年前的东西.
然而,所有回复中有关计算以及据的例子都是教科书里常见的,历史上产品里的"纯粹串行方式".
然而,目前的接收机,全部都是多路并行相关器.
先生若是这样说: 当相关器的数量是多少?他们可能会怎么用法,于是从开机到锁定会要多少时间,其理由是...这样是否更好?
先生没有对我的想法"我对于20万个相关器的说法,是有异议的",表示自己的看法。我是遗憾的。
2. 对于现有商品机可能采纳的几个措施:
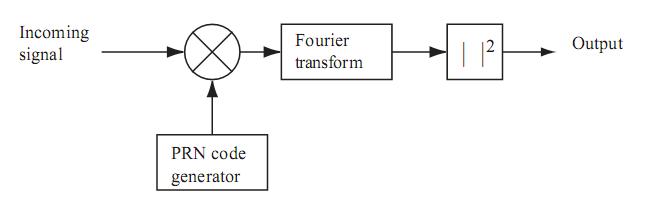
"1. 提高相关器运算频率 2.优化多普勒频偏扫描方法 3.采用FFT 4.多路并行相关器 "
他们对减少冷开机时间的贡献,先生却没有定量论述,而一笔带过.这是现有商品机,是我们问题针对的对象.
3. 关于"电文及30秒",先生没有列举其中的关键参数是什么?以及利用他们来完成定位的大约计算时间(结合商品机,以ARM
为例),因为,这也是冷启动时间的一部分.
(对我来说,由于电文属于我自学3年级的课,还没有学到.不过,也有听听的兴趣.)
对于我在12楼提出的问题(各个卫星发导航电文是否是同步的?若是,老美为什么要这样做?),先生也没有指点,有点遗憾.
4. 冷启动时间应该是变量"停机时间"的函数.至少这样的观点想必不会遭到反对. 是否可以以此为题,开个课.
以上是我学生对老师的点评. 请老师指正.
------------------------------------------------------------------------------------------------
另外:
"另一篇帖子里,看到elder60 想用FFT."
恰恰相反,是误解: 请看"老头学GPS 射频前端"110楼, 不过很想听先生对31楼论文的评价.
感觉先生没有细看该贴. 那是个纪实剧--"我(GPSDIYer)的'成长的烦恼'",欢迎先生常来光顾.
在该贴28楼,有这样的记载:
开此贴的目的不在于我做出什么来,只要能使更多网友来参与GPS接收机的DIY,就了我心愿。OURDEV需要提高层次)
...看“征:GPS开源活动负责人.(精彩的技术讨论从61楼开始)”,我很着急,又不懂,不好插嘴。
但总要干起来才行啊!于是我这个“半脚猫跳上台耍猴“了。
上述讨论中也有你(第三主角).
你们专家们 ●为●什●么 就不能来开一个贴,带领年轻人一起玩一下呢? 观点不同,单独开贴,比试比试也可以啊!
如果你们愿意这样做,我会很高兴的.这样,我会把我的帖子停了.并感谢你们救我一命.
(我现在的身体,打字极困难,此贴我是从早上8点开始打的,3个多小时啊!)
可能我用词太过分,但愿先生能够体谅我. |
|



 发表于 2010-9-16 08:18:33
发表于 2010-9-16 08:18:33