|
|

楼主 |
发表于 2010-11-18 13:19:50
|
显示全部楼层
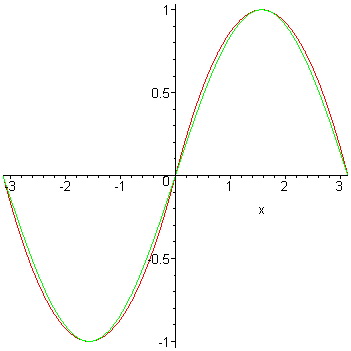
个人编写的matlab的源程序
(原文件名:截图00.jpg)
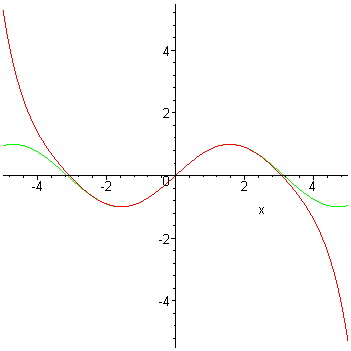
x=linspace(-pi,pi,1000);
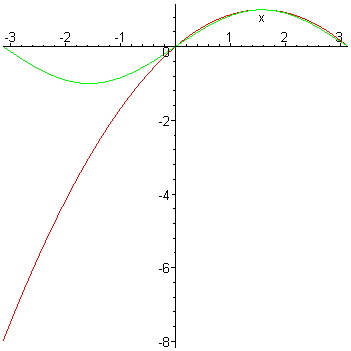
y_sin=sin(x);
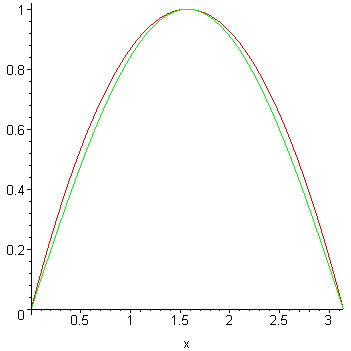
y_new=4/pi .*x - 4/pi^2.*x.*abs(x);
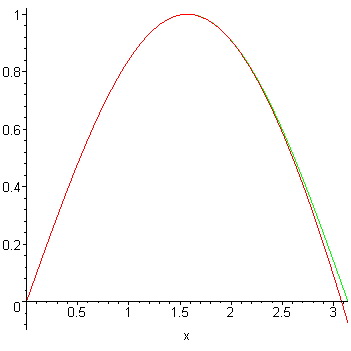
y_best= 0.782.*y_new + 0.218 .*(y_new.*y_new);
pic=plot(x,y_sin,'g',x,y_new,'r',x,y_best);
grid on;
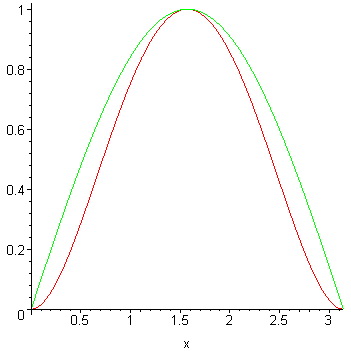
axis([0 pi 0 1]);
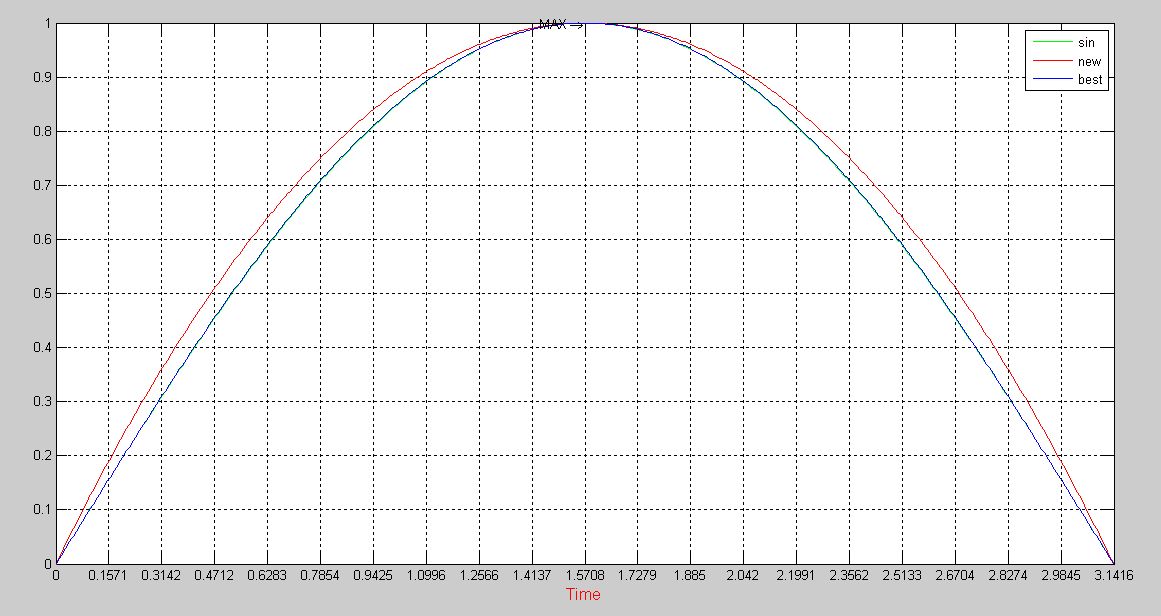
X=-pi:pi./20:pi;
Y=0:1/10:1;
set(gca,'xtick',X,'ytick',Y) %设置网格的显示格式,gca获取当前figure的句柄
set(xlabel('Time'),'FontSize',12,'Color','r');
legend(pic,'sin','new','best') %添加图例
[y_max,ix]=max(y_sin); %找到y1的最小值以及改值的下标,赋给y和ix
text(x(ix),y_max,'MAX \rightarrow','HorizontalAlignment','right') %插入文本 |
|



 发表于 2010-11-18 12:38:39
发表于 2010-11-18 12:38:39