|
|

楼主 |
发表于 2013-12-17 21:10:16
|
显示全部楼层
本帖最后由 oldbeginner 于 2013-12-17 21:13 编辑
学习思路计划这样,
1、这节笔记重点还是下位机,先单独通讯模拟;然后函数实现模拟(重点定时器);最后合并。
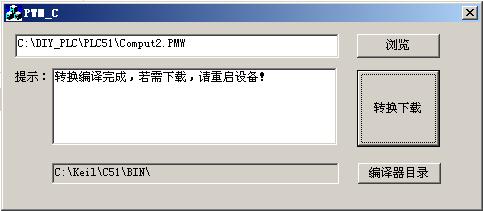
2、PWM转C也是需要理解的,因为它和下位机的关系密切,会放在另一节笔记当中。
3、硬件电路设计,硬件电路设计思想没有,但是在另一帖子对简易PLC下一代电路有过设计思路,可以作为借鉴;之前还要考证一下是否适合硬件设计入门,因为我还没有这方面知识。
********************************************************
首先是下位机通讯模拟,因为采用的上位机是FXGP,事实证明软件本身有些麻烦。
http://www.amobbs.com/thread-5563153-1-1.html
在问题1的帖子里,知道了要短接,为什么?我还需要了解一下,因为目前使用串口助手和使用FXGP效果不一致。
先理解一下,9600,n,8,1和 9600,e,7,1 的区别
9600,n,8,1
9600,e,7,1
下位机相应的函数为,
UartSendByte((unsigned char *)OrderSend1,8);
其中
unsigned char code OrderSend1[]={0x02,0x36,0x32,0x36,0x36,0x03,0x44,0x37};
为什么少了几个字符?需要找资料。
9600,e,7,1是什么?这个问题曾经理解过,但是不够,
搜一下,
http://bbs.21ic.com/icview-346408-1-1.html
计算、修改D7位的数据后再按9600.N.8.1的格式发送即可。D7位是偶校验位,需要计算,不能屏蔽。按9600.N.8.1的格式发送。
对下位机的影响,下位机接收后,需要把D7屏蔽得到正确ASCII码(SBUF&0x7f);发送时,D7需要置1吗?
还要参考
台达变频器和C51单片机之间的通讯应用
http://wenku.baidu.com/link?url= ... UEHc2c3JUDiOX-a-nJa
这篇文章看来需要理解一下。
|
本帖子中包含更多资源
您需要 登录 才可以下载或查看,没有帐号?注册
x
|


 发表于 2013-12-15 21:16:41
发表于 2013-12-15 21:16:41