|
29
|
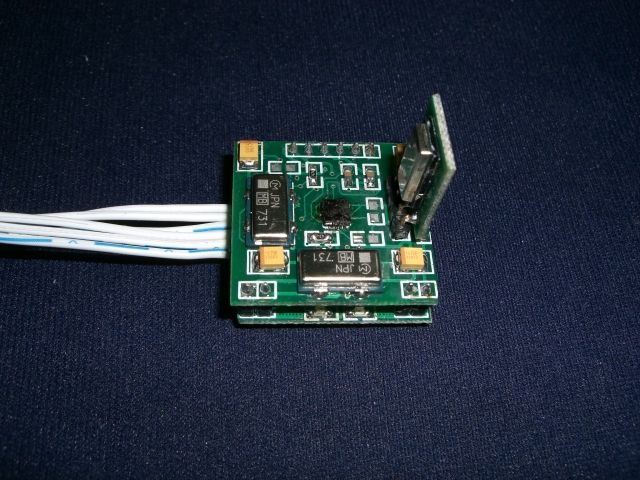
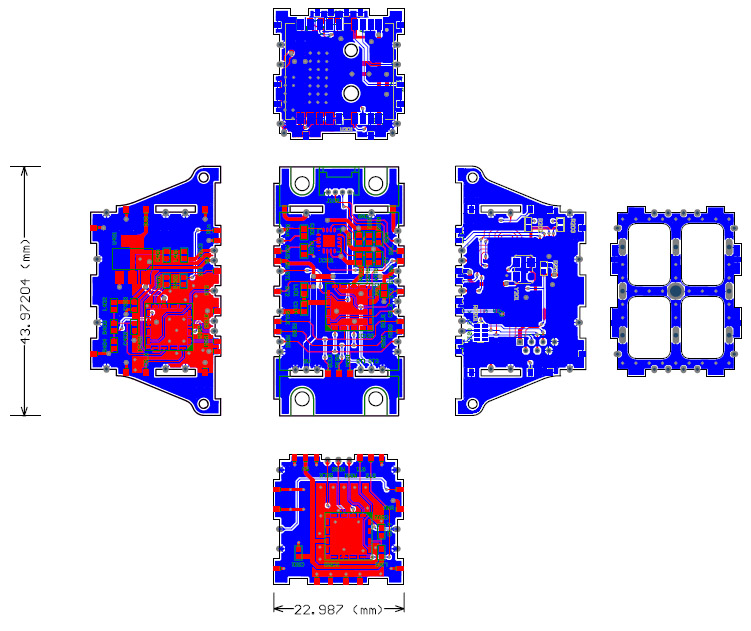
瞎画的IMU板子,拍砖吧各位。 |
阿莫论坛20周年了!感谢大家的支持与爱护!! | ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
手机版|Archiver|amobbs.com 阿莫电子技术论坛 ( 粤ICP备2022115958号, 版权所有:东莞阿莫电子贸易商行 创办于2004年 (公安交互式论坛备案:44190002001997 ) )
GMT+8, 2024-4-29 09:25
© Since 2004 www.amobbs.com, 原www.ourdev.cn, 原www.ouravr.com


 发表于 2008-7-23 00:28:56
发表于 2008-7-23 00:28:56
 楼主
楼主