|
76
|
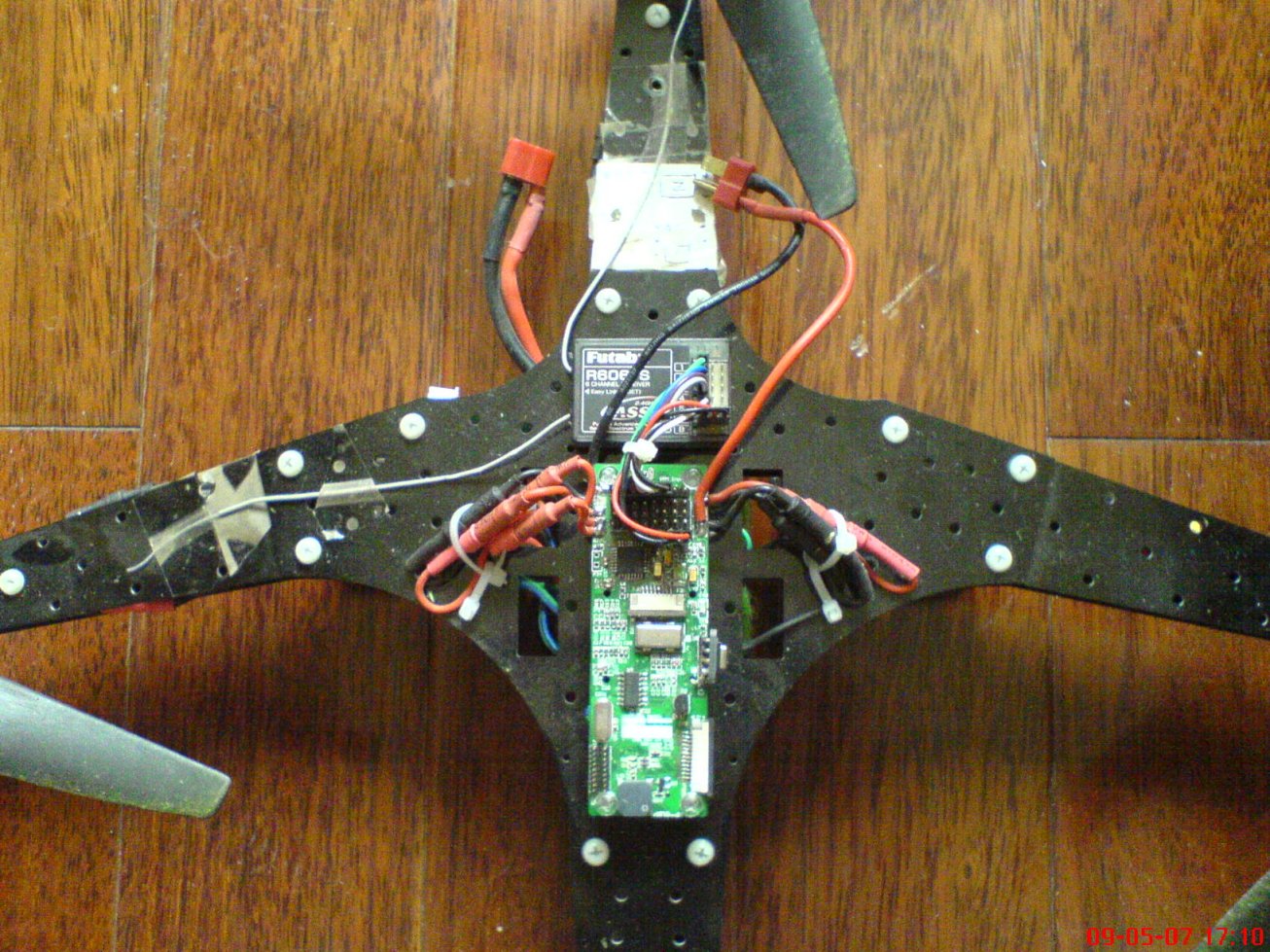
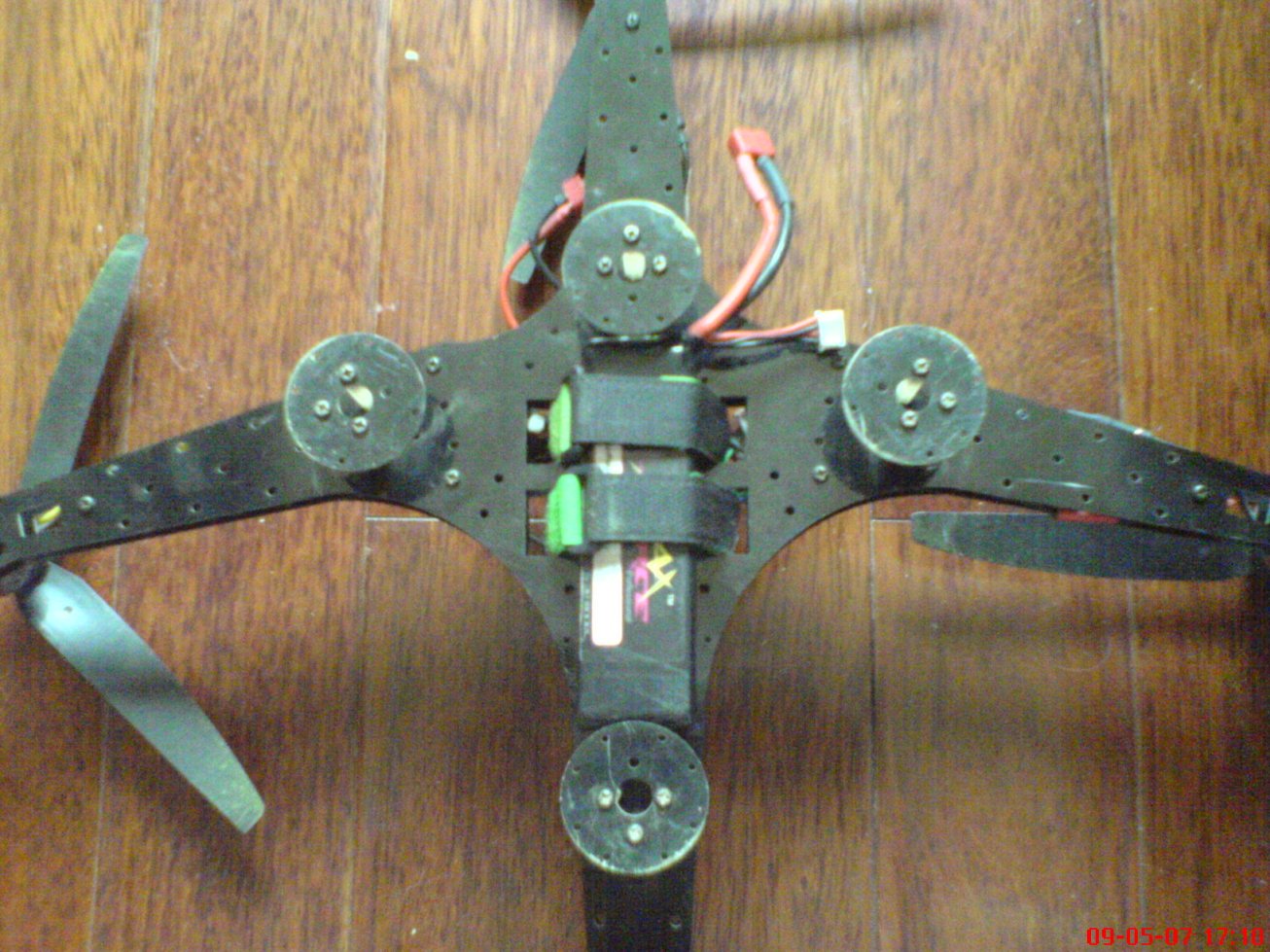
[分享]原创四轴DIY小结 |

阿莫论坛20周年了!感谢大家的支持与爱护!!
如果天空是黑暗的,那就摸黑生存;
如果发出声音是危险的,那就保持沉默; 如果自觉无力发光,那就蜷伏于牆角。 但是,不要习惯了黑暗就为黑暗辩护; 也不要为自己的苟且而得意; 不要嘲讽那些比自己更勇敢的人。 我们可以卑微如尘土,但不可扭曲如蛆虫。 | ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
| ||
手机版|Archiver|amobbs.com 阿莫电子技术论坛 ( 粤ICP备2022115958号, 版权所有:东莞阿莫电子贸易商行 创办于2004年 (公安交互式论坛备案:44190002001997 ) )
GMT+8, 2024-9-20 23:58
© Since 2004 www.amobbs.com, 原www.ourdev.cn, 原www.ouravr.com


 发表于 2009-5-7 17:06:30
发表于 2009-5-7 17:06:30
 楼主
楼主