|
|
 发表于 2010-2-1 15:27:18
|
显示全部楼层
发表于 2010-2-1 15:27:18
|
显示全部楼层
回复【12楼】capricornx
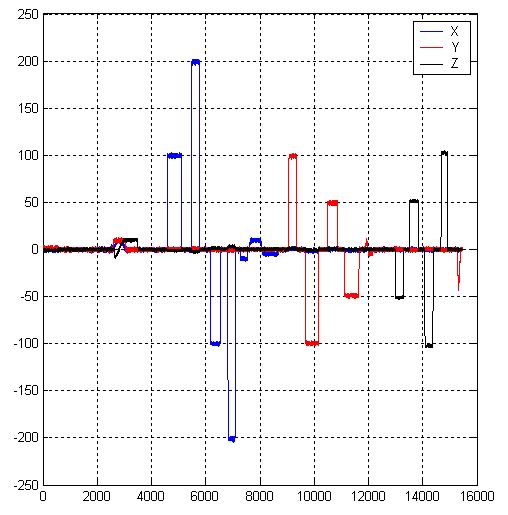
今天在三维转台上试了下陀螺仪,LISY300AL的准确度还是不错的,最差的Z轴在+-100°/s时变化为205°/s;交叉轴的敏感也很小,说明安装精度也还也可;在模拟滤波器截止频率40Hz的情况下,STM32的12位AD采集的角速度噪声标准差为1.2°/s RMS,拿掉数传后减小为0.7°/s RMS,已经与其标称的0.1°/s/sqrt(h-z)很相近了,比ENC03确实要好很多。不过很难焊,焊坏了好几个,期待LPR530,指标要稍好些,焊盘大好焊。
(原文件名:陀螺校正.jpg)
<A class=tt16 onclick="fnQuickImageQuote(this,'files_23/ourdev_515611.jpg','原文件名:陀螺校正.jpg')" href......
-----------------------------------------------------------------------
楼主最终版本的低通滤波是用软件实现的还是用硬件实现的?40Hz选的不错。
四轴之类的小航模就在这个频段,真实的单引擎固定翼大飞机典型频段还要低些。
瑞士Leica公司绘制的航拍飞行时典型角运动频谱特性图:
<center>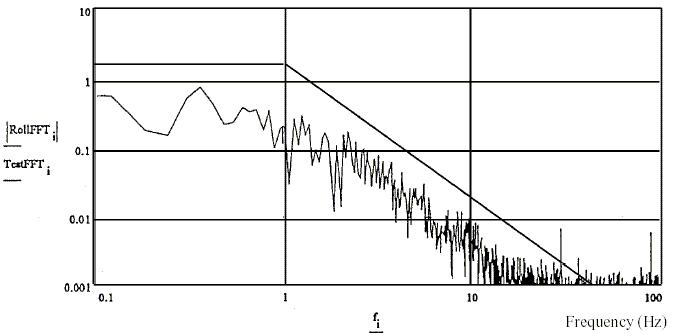
(原文件名:FFT.JPG) |
|


 楼主
楼主