|
|
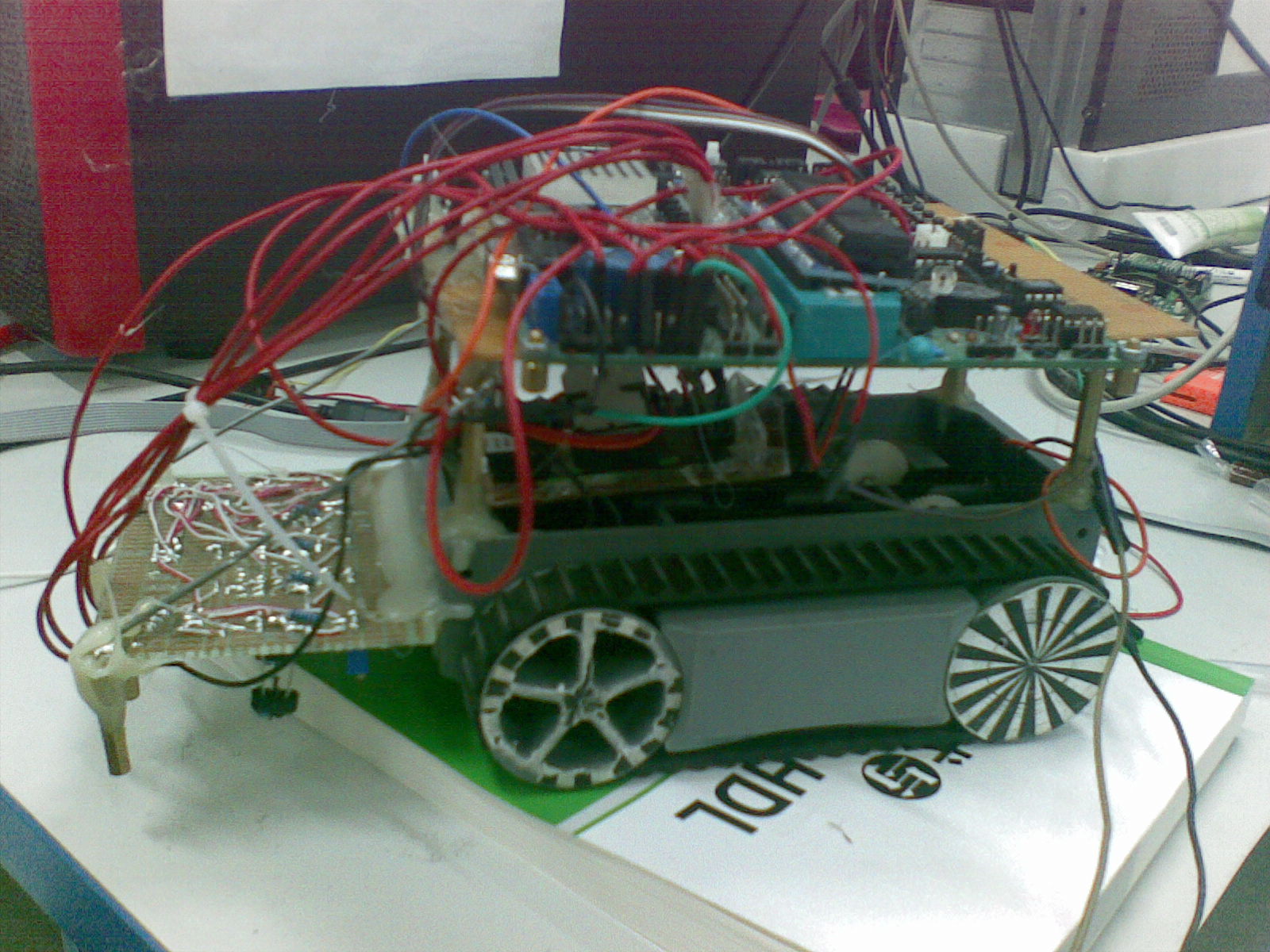
(原文件名:20100605_001.jpg)
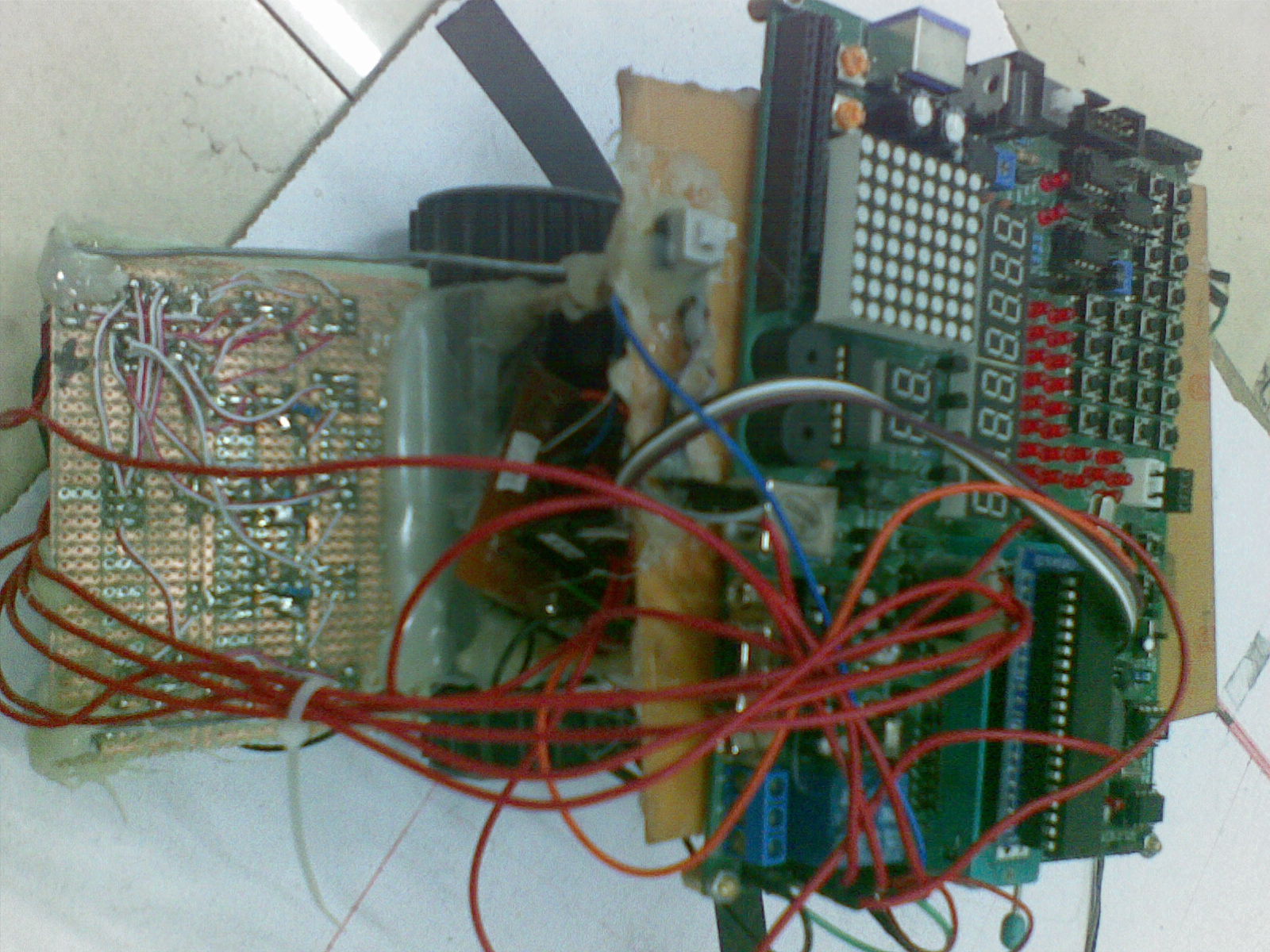
(原文件名:20100605_006.jpg)
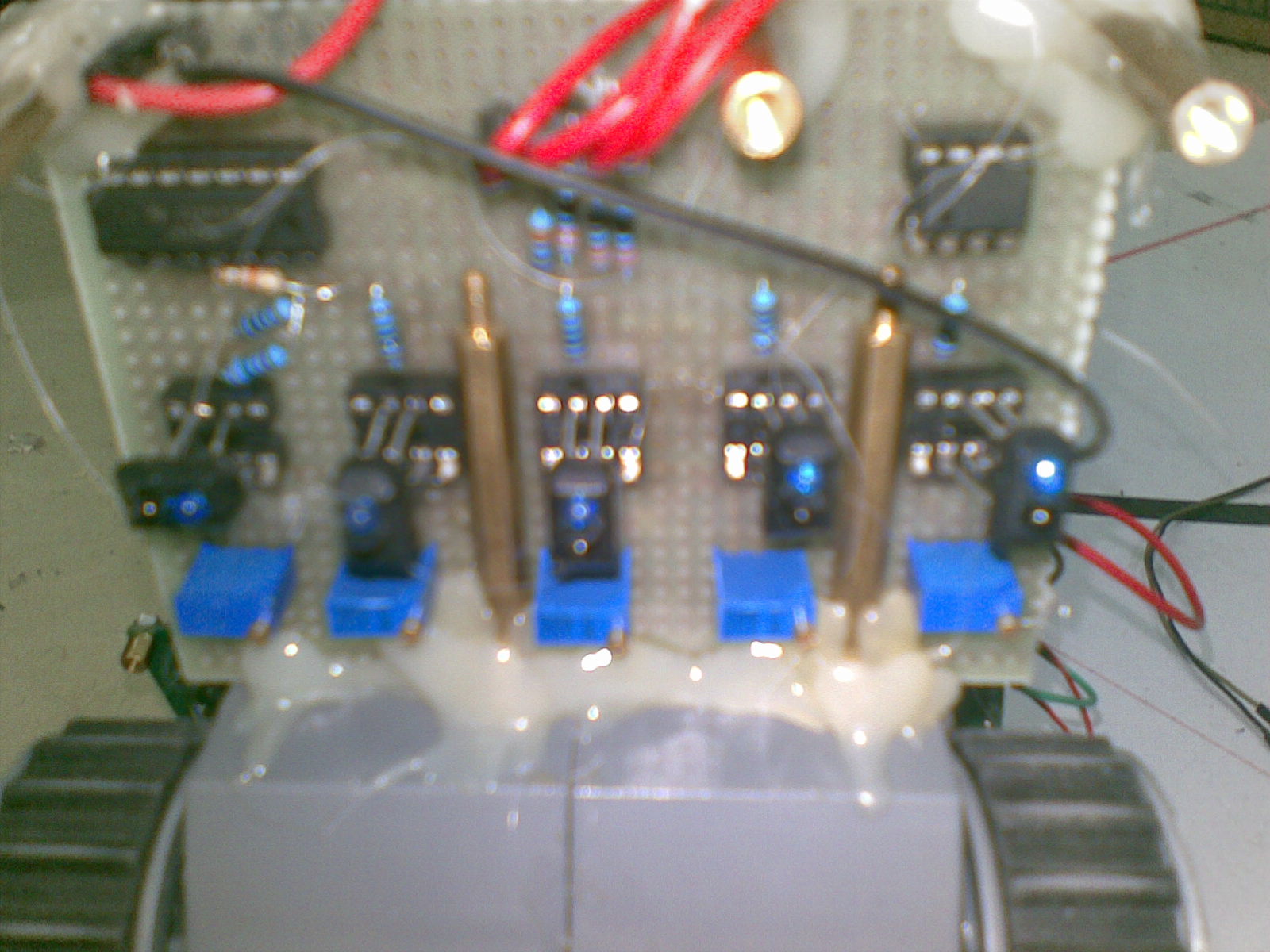
(原文件名:20100605_007.jpg)
/*****************************************************
This program was produced by the
CodeWizardAVR V1.25.7a Evaluation
Automatic Program Generator
?Copyright 1998-2007 Pavel Haiduc, HP InfoTech s.r.l.
http://www.hpinfotech.com
Project :
Version :
Date : 2010/5/25
Author : Freeware, for evaluation and non-commercial use only
Company :
Comments:
Chip type : ATmega16L
Program type : Application
Clock frequency : 8.000000 MHz
Memory model : Small
External SRAM size : 0
Data Stack size : 256
*****************************************************/
#include <mega16.h>
#include<delay.h>
#define P PORTA
#define m 60
/*void turnleftslow(void)
{
OCR0=100;
OCR2=255;
} */
void turnleftfast(void)
{
PORTD=1|(1<<3);
OCR0=m;
OCR2=m;
}
/*
void turnrightslow(void)
{
OCR0=255;
OCR2=30;
}
*/
void turnrightfast(void)
{
PORTD=(1<<1)|(1<<2);
OCR0=m;
OCR2=m;
}
void fastforward()
{
PORTD=1|(1<<2);
OCR0=20;
OCR2=20;
}
// Declare your global variables here
/*
void display(unsigned char a)
{
switch(a)
{ case 0:
P=0xc0;
break;
case 1:
P=0xf9;
break;
case 2:
P=0xa4; break;
case 3:
P=0xb0;
break;
case 4:
P=0x99;
break;
case 5:
P=0x92;
break;
case 6:
P=0x83;
break;
case 7:
P=0xf8;
break;
case 8:
P=0x80;
break;
case 9:
P=0x98;
break;
case 'A':
P=0x88;
break;
case 'B':
P=0x00;
break;
case 'C':
P=0xC6;
break;
case 'D':
P=0x40;
break;
case 'E':
P=0x06;
break;
case 'F':
P=0x8e;
break;
}
}
void forward(void)
{
PORTD=1|(1<<2)
}
void back(void)
{
PORTD=(1<<1)|(1<<3)|(1<<4)|(1<<5);
}
*/
//void turnleft(void)
//{
//PORTD=(1<<2)|(1<<5);
//}
/*
void turnright(void)
{
PORTD=1|(1<<4);
}
*/
void main(void)
{
// Declare your local variables here
ASSR=ASSR|(1<<3);
// Input/Output Ports initialization
// Port A initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTA=0x00;
DDRA=0x00;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTB=0xff;
DDRB=0xff;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTC=0x00;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=T State6=T State5=T State4=T State3=T State2=T State1=T State0=T
PORTD=0x00;
DDRD=0xff;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
// Mode: Fast PWM top=FFh
// OC0 output: Disconnected
TCCR0=0b01111001;
TCNT0=0x00;
OCR0=20;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: Timer 1 Stopped
// Mode: Normal top=FFFFh
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer 1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer 2 Stopped
// Mode: Normal top=FFh
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0b01111001;
TCNT2=0x00;
OCR2=20;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2: Off
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x00;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
PORTD=1|(1<<2);
while (1)
{
if(PINC&(1<<2))
{fastforward();
}
if(PINC&1)
{
turnrightfast();
}
else
if(PINC&(1<<1))
{
turnrightfast();
}
else if(PINC&(1<<3))
{
turnleftfast();
}
else if(PINC&(1<<4))
{
turnleftfast();
}
}
} |
阿莫论坛20周年了!感谢大家的支持与爱护!!
一只鸟敢站在脆弱的枝条上歇脚,它依仗的不是枝条不会断,而是自己有翅膀,会飞。
|


 发表于 2010-6-5 20:35:51
发表于 2010-6-5 20:35:51