|
|
我的自平衡巡线小车,目前实现了自平衡功能, 巡线还未加上. 巡线还未加上.
小车的设计思想是方便加装循迹\走迷宫配件,同时具有自平衡效果.
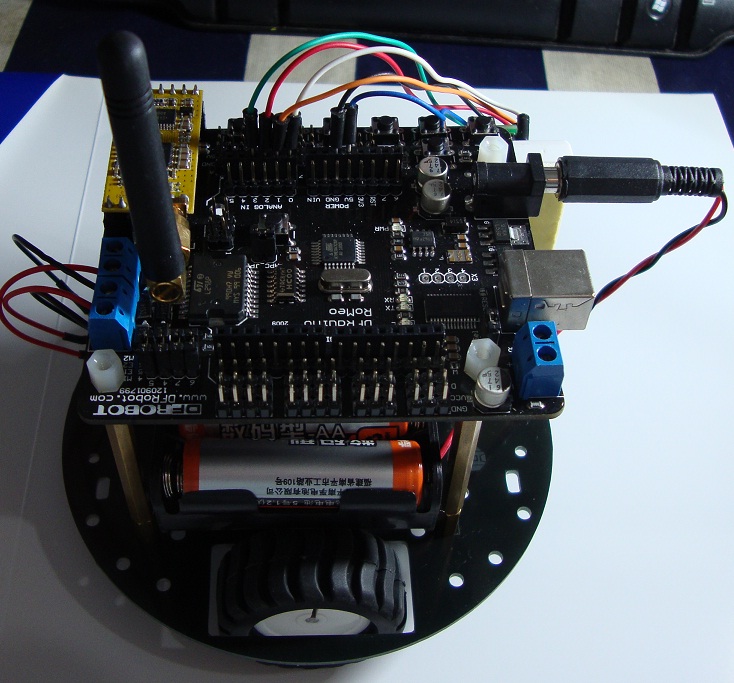
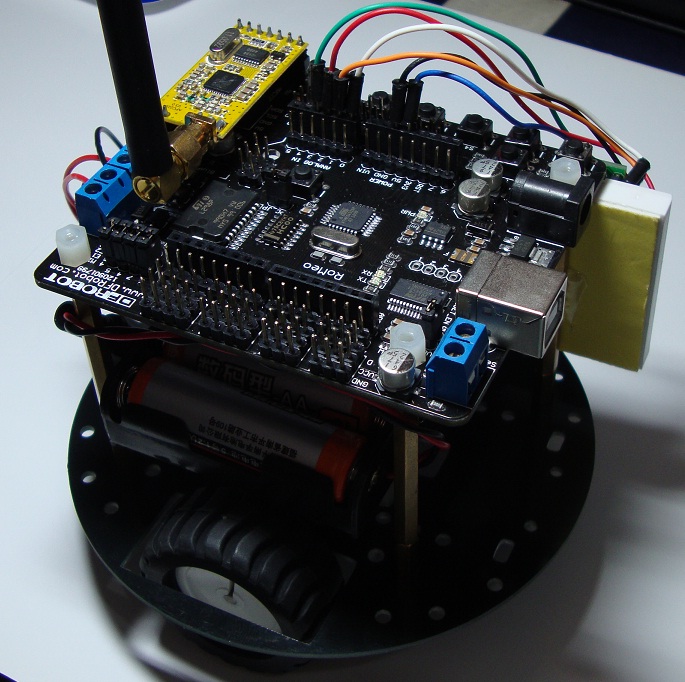
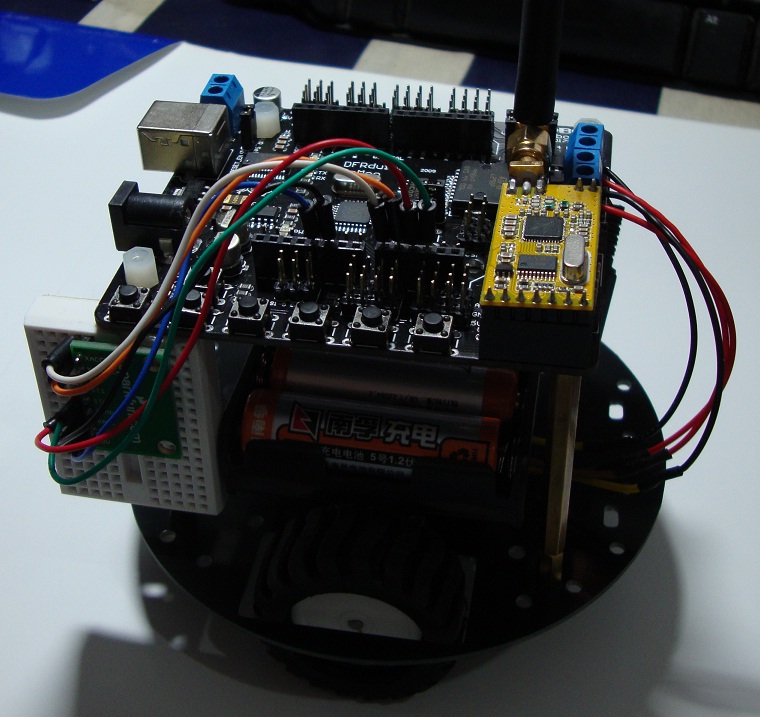
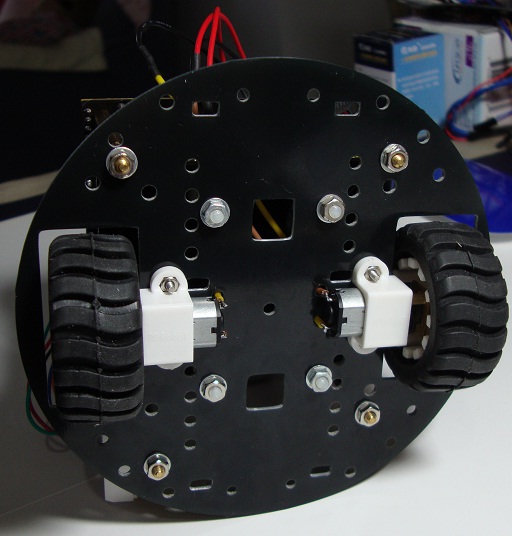
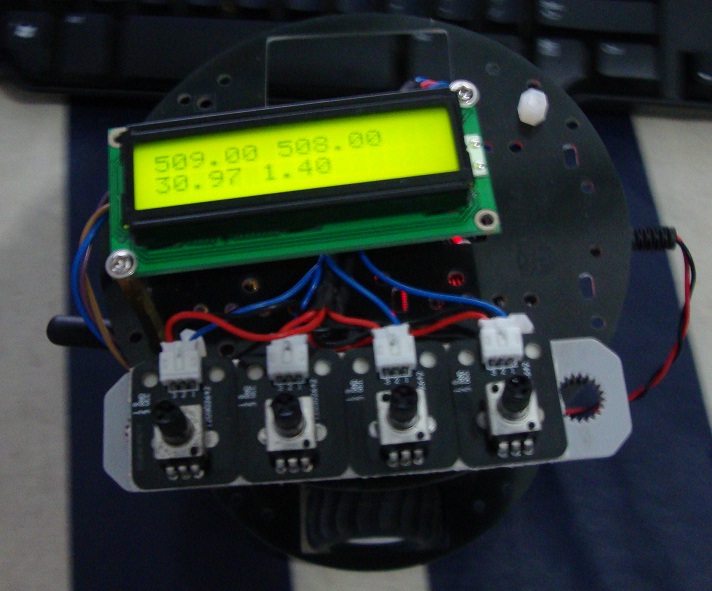
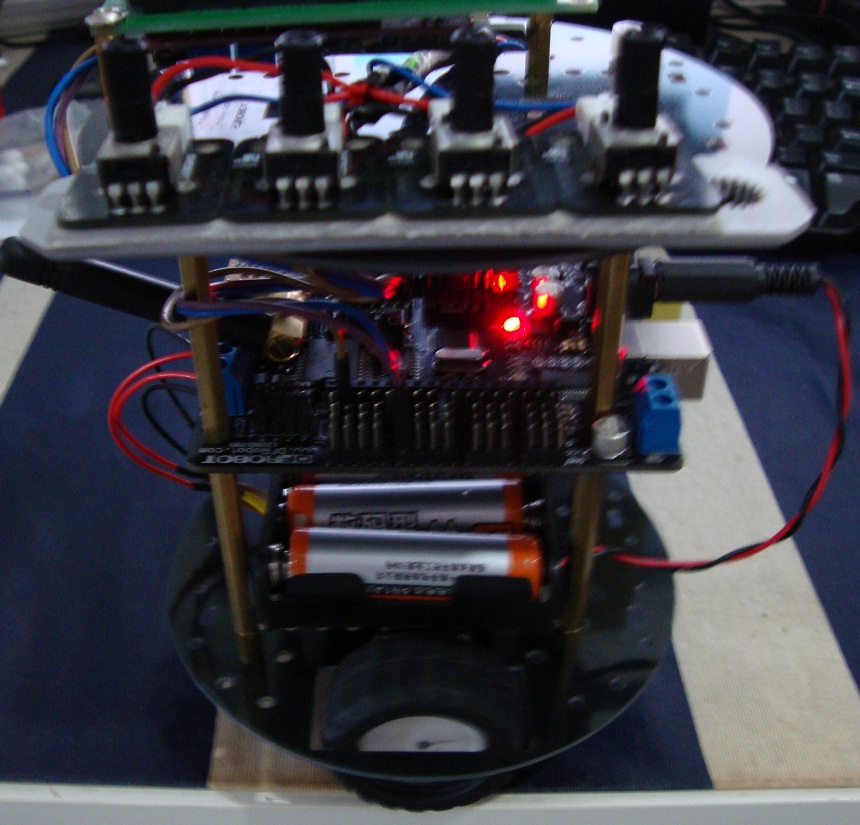
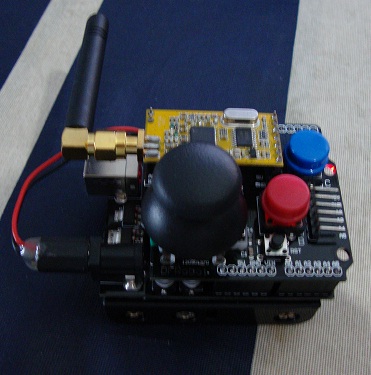
小车使用dfrobot的mini系列配件制作,包括微型减速电机, mini class玻纤底盘, arduino romeo整合控制板, apc220 v3.0无线设备, aruino摇杆, 加速度传感器\陀螺仪和巡线传感器\接近传感器(安装在mini面包板以及底盘上), 以及1.2V*5=6V电池盒(或1.5V*4=6V电池盒)\铜柱等.
当然也可以选装显示屏幕, 可变电位计等调试用配件.
小车不需要自己制作电路板,因为romeo电路板已经能满足绝大部分输入输出的需要.用一些杜邦线拼插传感器就行了.有些地方需要用热熔胶固定一下.
小车的组装非常容易,半小时就基本能组装好.
小车目前能实现自平衡运动,小车可以携带一些负载,而且可以保持平衡不失去.
巡线和走迷宫需要更进一步的开发.通过选用减速比不同的电机,我会尽最大可能在平衡和小车速度之间找到最佳配比.
各元件价格:romeo=305. apc200一套两个=270. 普通arduino328+遥控器板=242. 5节电池盒+4节电池盒=11. 串口液晶显示器=80. 4个可变电位计=68. 用于传感器的面包板=15. 2轴加速度1轴陀螺仪整合传感器=1225. 7个铜柱+杜邦线等=20. 两套电机+轮子=140. 两块打好孔的小车底板=20. 5节镍氢电池2400mAH=125(南孚). 4节遥控器用普通电池=1.25
所以这个小车的总造价=2522.25元.  加上我一个星期的人工费约等于6000元吧^_- 加上我一个星期的人工费约等于6000元吧^_-
这个价钱是自平衡的,还不包括巡线\防撞等.
如果大家有兴趣,可以讨论一下,如何最大限度的降低成本?(如,产品售价降低到300元以下.成本150左右)
我在这里抛砖引玉:专门设计的底盘,整合所有电子元件,整合电池盒以及 无线\液晶屏\姿态传感器板接口.做姿态传感器标准接口,可以适应多种姿态传感器的选择.电池使用8元一节的18650锂电池.
这样,成本就能大大降低啦!
(原文件名:1.jpg)
(原文件名:2.jpg)
(原文件名:3.jpg)
(原文件名:4.jpg)
(原文件名:5.jpg)
(原文件名:7.jpg)
(原文件名:8.jpg)
(原文件名:9.jpg)

(原文件名:10.jpg) |
|


 发表于 2010-9-18 10:44:28
发表于 2010-9-18 10:44:28
 楼主
楼主