|
|

楼主 |
发表于 2010-12-11 13:59:04
|
显示全部楼层
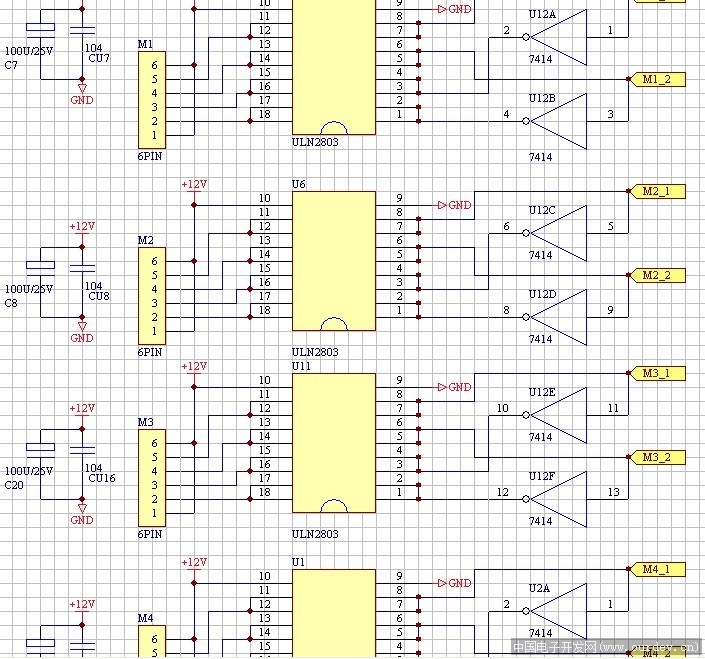
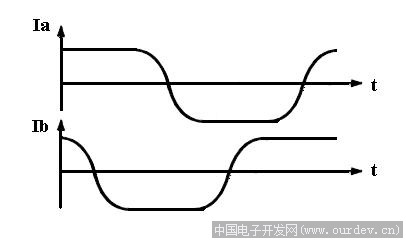
今天我大开杀戒,把我最珍贵的步进电机加减算法公布出来,大家好好收藏!!!!
unsigned int code wTableBrakeSpace211_1[] =
{
0, 2, 5, 9, 14, 20, 27, 35, 44, 54, 65, 77, 90, 104, 119, 135,
152, 170, 189, 209, 230, 252, 275, 299, 324, 350, 377, 405, 434, 464, 495, 527,
560, 594, 629, 665, 702, 740, 779, 819, 860, 902, 945, 989, 1034, 1080, 1127, 1175,
1224, 1274, 1325, 1377, 1430, 1484, 1539, 1595, 1652, 1710, 1769, 1829, 1890, 1952, 2015, 2079,
2144, 2210, 2277, 2345, 2414, 2484, 2555, 2627, 2700, 2774, 2849, 2925, 3002, 3080, 3159, 3239,
3320, 3402, 3485, 3569, 3654, 3740, 3827, 3915, 4004, 4094, 4185, 4277, 4370, 4464, 4559, 4655,
4752, 4850, 4949, 5049, 5150, 5252, 5355, 5459, 5564, 5670, 5777, 5885, 5994, 6104, 6215, 6327,
6440, 6554, 6669, 6785, 6902, 7020, 7139, 7259, 7380, 7502, 7625, 7749, 7874, 8000, 8127, 8255,
8384, 8514, 8645, 8777, 8910, 9044, 9179, 9315, 9452, 9590, 9729, 9869,10010,10152,10295,10439,
10584,10730,10877,11025,11174,11324,11475,11627,11780,11934,12089,12245,12402,12560,12719,12879,
13040,13202,13365,13529,13694,13860,14027,14195,14364,14534,14705,14877,15050,15224,15399,15575,
15752,15930,16109,16289,16470,16652,16835,17019,17204,17390,17577,17765,17954,18144,18335,18527,
18720,18914,19109,19305,19502,19700,19899,20099,20300,20502,20705,20909,21114,21320,21527,21735,
21944,22154,22365,22577,22790,23004,23219,23435,23652,23870,24089,24309,24530,24752,24975,25199,
25424,25650,25877,26105,26334,26564,26795,27027,27260,27494,27729,27965,28202,28440,28679,28919,
29160,29402,29645,29889,30134,30380,30627,30875,31124,31374,31625,31877,32130,32384,32639,32895,
65535
};
#include "Motor.h"
#include "Pan.h"
bit
bPanMotorMove,
bPanMotorDirection,
bPanPositionInverse;
unsigned char xdata
cPanDmxValue,
cPanPositionValue,
cPanAutoSpeed,
cPanOffsetValue,
cPanDriveValue,
cPanDriveDelay;
unsigned char xdata
cPanMotorSpeed,
cPanMotorNowSpeed,
cPanMotorResetStep;
unsigned int xdata
wPanMotorNowPosition,
wPanMotorEndPosition;
void PanSetSpeed(void)
{
if (cPanAutoSpeed < PAN_MAX_SPEED)
{
cPanMotorSpeed = cPanAutoSpeed;
}
else
{
cPanMotorSpeed = PAN_MAX_SPEED;
}
}
void PanGetAutoSpeed(unsigned int i)
{
cPanAutoSpeed = i / 350;
PanSetSpeed();
}
void PanReset(void)
{
// initial
cPanMotorNowSpeed = 0;
wPanMotorNowPosition = 30000;
// Dmx
cPanDmxValue = 0;
cPanPositionValue = 0;
// reset
wPanMotorEndPosition = 0;
cPanMotorSpeed = 5;
// state
cPanMotorResetStep = 127;
// flag
PanSetMoveFlag();
Motor.wResetState |= (1 << PAN);
}
void PanProcStep(void)
{
unsigned char c;
DOUBLE_BYTE i;
if (wPanMotorNowPosition > wPanMotorEndPosition)
{
i.word = wPanMotorNowPosition - wPanMotorEndPosition;
c = DECREASE;
}
else
{
i.word = wPanMotorEndPosition - wPanMotorNowPosition;
c = INCREASE;
}
if ((i.word != 0) || (cPanMotorNowSpeed != 0))
{
if (c != bPanMotorDirection)
{
bPanMotorDirection = c;
if (cPanMotorResetStep == 0)
{
PanGetAutoSpeed(i.word);
}
}
if ((c != bPanMotorDirection) || (i.word < wTableBrakeSpace211_1[cPanMotorNowSpeed]))
{
c = 0;
}
else if ((i.word < wTableBrakeSpace211_1[cPanMotorNowSpeed + 1]) && (cPanMotorSpeed > cPanMotorNowSpeed))
{
c = cPanMotorNowSpeed;
}
else
{
c = cPanMotorSpeed;
}
if (cPanMotorNowSpeed != c)
{
if (cPanMotorNowSpeed < c)
{
++ cPanMotorNowSpeed;
}
else
{
-- cPanMotorNowSpeed;
}
}
c = cPanMotorNowSpeed;
if (c == 0)
{
c = 1;
}
if (bPanMotorDirection)
{
wPanMotorNowPosition += c;
}
else
{
wPanMotorNowPosition -= c;
}
c = wPanMotorNowPosition >> 4;
if (c != cPanDriveValue)
{
cPanDriveValue = c;
Uln2803Drive(0, -c);
}
}
else if (PanIsMove())
{
PanClearMoveFlag();
}
else if (cPanMotorResetStep)
{
wPanMotorNowPosition = 0;
wPanMotorEndPosition = 0;
cPanMotorResetStep = 0;
Motor.wResetState &= ~(1 << PAN);
}
}
void PanProcPositionDmxValue(unsigned char c)
{
DOUBLE_BYTE i;
cPanPositionValue = c;
if (bPanPositionInverse)
{
c = 255 - c;
}
wPanMotorEndPosition = c* 100;
if (wPanMotorNowPosition > wPanMotorEndPosition)
{
i.word = wPanMotorNowPosition - wPanMotorEndPosition;
c = DECREASE;
}
else
{
i.word = wPanMotorEndPosition - wPanMotorNowPosition;
c = INCREASE;
}
if ((c == bPanMotorDirection) || (cPanMotorNowSpeed == 0))
{
PanGetAutoSpeed(i.word);
}
PanSetMoveFlag();
} |
|
 [复制链接]
[复制链接]


 发表于 2010-12-8 08:50:24
发表于 2010-12-8 08:50:24