|
|
[image]http://art.china.cn/products/images/attachement/jpg/site8/20110225/002564bab90d0ed17a6a17.jpg[/image]
单轮版自平衡小车solowheel,不能像segway那样原地悬停、前进后退。
单轮自平衡小车骑起来的感觉像是自行车。
今后的一段时间我将持续更新单轮自平衡小车的开发详细内容。
其原理是:
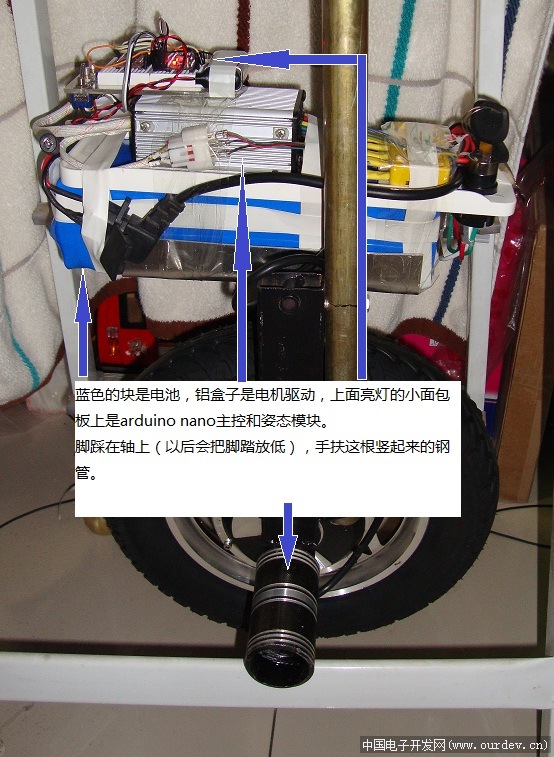
1:自行车的轴中心不变特性维持基本的Y轴平衡,直立姿态
2:骑车人的主动方向控制纠正Y轴平衡以及转弯。
3:单轮在X轴上的姿态稳定,这里用到了segway类似的技术
但单轮车也有自己的优势:
1:比segway少了一套电机、电池、车架,降低了研发难度和成本
2:便携,紧紧抓住此类小车的代步特性,虽然牺牲了原地悬停等“酷”功能但获得了实用性上的提高。
图中的solowheel我们很容易仿制。
仿制solowheel的目标:
12寸小轮, 站立驾驶. 使用锂聚合物电池36v1块, 使用一个无刷电机驱动器, 使用一个单轴陀螺,双轴加速传感器.
使用arduino板子做控制器.控制频率100Hz.
小车时速10km左右.跟自行车相当. 使用更大功率的电机可以提高速度.
对solowheel作出一点改进: 加一个可以拆卸的扶手杆, 这样骑行的时候可以用手来握住扶手.
跟segway不同,这个扶手和车子是整体不可动的.
至于驾驶感觉, 可以在不用扶手和使用扶手上切换一下, 具体感觉哪个好就用哪个.
也方便在这个扶手杆上增加一个车座. 因为很多人在我做segway的时候就提出要加车座.民_意很大啊!
这样我们的小车就有三种驾驶方式:
1.用脚和腿控制的纯solowheel模式,
2.用手扶杆,脚踩脚踏板的类似segway的方式
3.用手扶杆,脚踩脚踏板, 坐姿的方式.
开发用的原材料:
1:轮子.价格300元.
鉴于体积, 使用轮子和无刷电机一体化的设计.这样可供选择的无刷电机比较便宜,样式也很多
一体化轮毂无刷电机分为有齿行星减速无刷电机, 和无齿轮毂无刷电机.
solowheel号称使用了1000w的电机,我表示某种程度的怀疑...
因为我拆过原版的segway, 里面的700w电机个头也不小. solowheel这么小的体积恐怕很难放下.
所以, 我们选择有齿无刷一体化轮毂电机.功率250W. 别看它小, 但因为有齿轮的缘故, 低速力矩好,
我们可以用它来做第一版.根据实际情况调整电机功率.
电机+轮毂=12寸, 是很迷你的小轮子. 采用小轮子还有一个好处就是可以把脚踏板做在轴上,简化结构.
2:车架.价格50元
采用12寸小轮车(小金鱼电动车)的后叉作为基本车架. 车架从车轴开始直立放置. 车轴安装脚踏板.
向上延伸一根操纵杆,中间轮子上方的部分用来放置电路和电池.
3:电池. 价格900元
采用36v10AH锂聚合物电池包.刚开始可以做个方块放在车架上.后期可以整合进车壳内.
4:驱动器和控制器,姿态模块.. 驱动器200左右(生产).原型车可能要700~1000.姿态模块300块
小车不需要悬停,也不能后退.所以只要带电子刹车功能的电动机驱动器改改就OK.不过市面上普通的驱动器不能直接用.
技术上相对segway复杂的驱动器,可谓简单明了.
控制器采用大家熟悉的arduino, 计算资源勉强够用.我们这个原型车要使用光电传感器+arduino中断来测速.
实际生产的话,就需要将驱动器和控制器整合, 至少使用stm32级的工业用处理芯片.
传感器方面,因为我们只需要考虑X轴平衡,所以我们使用1轴陀螺, 2轴加速度计.满足X轴的计算需要.
5: 软件:
上次发的segway驱动是一个早期的测试程序, 代码比较简单, 没有对当前倾角的精确计算, 没有数据融合, 也没有限速等功能.
因为当时还在开发早期.现在经过很多代测试,程序已经进化了很多. 我会根据试验逐步完善程序.
成本大约在1700左右.原型车成本2700左右.
solowheel售价18000...暴利啊!!!
OK, 计划完了, 实现中不可避免会有各种变化.
以我在segway项目上的经验, 应该不会有太大问题. |
|


 发表于 2011-5-23 08:46:14
发表于 2011-5-23 08:46:14
 楼主
楼主