|
|
从未做过标题党,也不想做那个,这个贴子的目的是当一回维基网页,需要的兄弟常来关注,我不喜欢,只写mark......的朋友
如果您做过,但没最后成功,比如,可以站立,但一直在晃,或摆动很大,请和我们分享你成功的部分,控讨迷惑的方面,如果您是我们所说的大侠,请尽可能用大家懂的方式,指导我们,不用浪费您太多时间,常来解惑,专题解读都可以.........
强调一下,至少来关注,来学习的,要有上些单片机和c语言基础,总不能让大侠们帮你解决位运算的破事儿吧,也不是要求大侠们慷慨教导根本不懂电子的大叔大婶来学会做这个,我想最起码的要求是,你懂点基础,有强烈的兴趣驱动,有决心来学习!!
我先打个框架,会有不对的地方,请哥们尽快纠正:
自平衡车的原理是一阶直线倒立摆,闭环控制。
传感器使用的多数是角度和角速度传感器,外加加速度计,也许现在很多方案用到了电子罗盘,并且陀螺仪用了比较高端的型号,但这里先不要这些,因为大多数朋友估计和我一样,只是希望架起这个结构,用一种自己明白的算法来控制,当然我们的目标是想要达到大卫的那个小车模式,无论是反应控制还是在不平的路面行走的能力!
无论是互补滤波还是卡尔曼,无论是300元以上的陀螺仪还是enc-03,我们要让车站起来,我们要知道怎样调电位器,通过理解的算法,让车更稳,而不是买来一大堆组装件,都挺新,组装起来,移植个算法,一开机,小车乱晃......不明所以......
(针对直线单级倒立摆系统的平衡控制问题,我们到底是要采用PID,LQR,还是模糊变结构控制方法呢?)
我们就一步步做,先选板,估计16和32都是可以接受的,第一步就是把加速度传感器、陀螺仪传感器、ADDA、单片机和上位机连起来,列出需要的电子贴片和其他元件,画出不很复杂的电路图,通过串口,使用10ms频率在上位机显示我们第一步取得的角度和角速度数据......
第二步就是明确原理的数据融合,一定要在上位机试波形,真正能纠正漂移,除去噪声,可以采用多种方法滤波,对比效果!!!!这里可能是我们真正的难点,无论是论坛里的一些前辈还是移植来国外的程序核心,关键是我们的注释,希望通过这个wiki做到手把手,基本脉络理清了,也许会有许多后进真正能把心沉到算法上,我们能达到大卫的功能性,而又是我们自己的程序块!
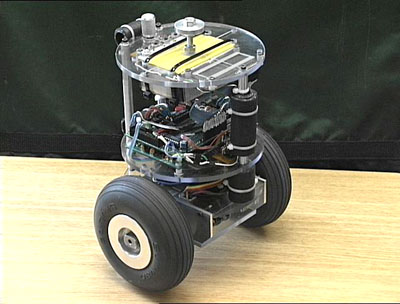
(原文件名:balancing-robot-known-as-nBot.jpg)
最后一步,可能是手工上比较费钱的,所以我个人建议等上两步学成了,再来,就是涉及电机等问题,主要的就是针对pwm如何使用的原理,原理明了了才能开始购买电机设备,据说底盘,电机这些硬件是模型中花费很大的一块!!!!算法一样是关键的,这是PWM专题。
以上都成型了,手把手也就告一段落,大家可以在自行改进算法的同时,开始加遥控,载物,室外行走等..........
从第一步起:让我们期待首篇较为详尽的原理分析和讲解,还是那句话,这是个工程,一步步来,先来第一步,谁来开讲呢????? |
|


 发表于 2011-7-28 11:21:06
发表于 2011-7-28 11:21:06
 楼主
楼主