|
|

楼主 |
发表于 2010-4-7 10:25:58
|
显示全部楼层
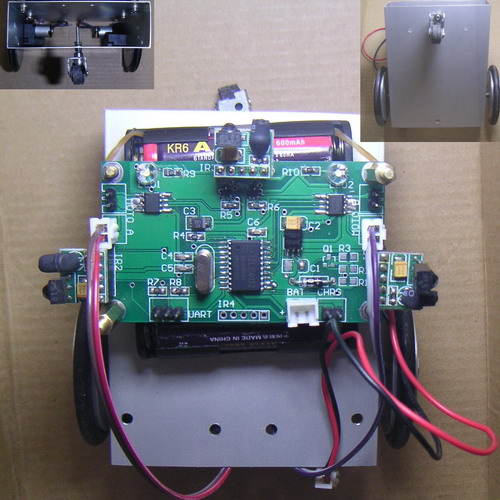
关于PWM调速:
经常有同学不太理解PWM调速,有时为了PWM而PWM,按我的理解,PWM的意思就是走走停停.就是说给一段动力,然后惯性行走一段,再给动力,再惯性行走,至于这个周期,可以理解为PWM周期.不同的电机合适的PWM是不同的,我用的小电机,线圈很细,线圈很多匝,电阻和电感都比较大,经过实际测试,30HZ以上的PWM,小车基本就不能动了,动力很弱.有的电机,合适的PWM值在100甚至几K的都有,因此差别很多,最好自己实际实验一下,确定合适的PWM. 一般PWM可以用定时器模拟,就是模拟走走停停.确定合适的PWM周期后,软件根据传感器的反馈来改变车速(对于三轮小车就是分别控制两边电机的动力强弱),就有一个比较好的参考了.比如控制太过精细,比如我这个小车,超过每秒30hz,或30fps,小车就有可能全身发抖,前进缓慢,甚至不前进.这就是因为施加在电机上的PWM频率过高.
因此理论上电机的感抗越小,电流越大,PWM越大,控制的会越精细,但对于以"智能"为主的小车来说,追求速度会带来很多问题:电池性能,重量,成本,干扰,保护等等.动力大了,小车碰撞很容易损坏,特别是塑料结构的.齿轮设计不好,齿轮也很容易卡坏,相对小车的体积和运行速度,选择每秒控制20次是足够的.对于高速以竞速为主的车,越高的控制频率小车越不容易失孔. |
|


 发表于 2010-4-7 12:53:43
发表于 2010-4-7 12:53:43