|
|
 发表于 2008-7-13 02:58:16
|
显示全部楼层
发表于 2008-7-13 02:58:16
|
显示全部楼层
zhcool,
I thought you should come up the ideal howto by now so I can learn from you after I'm attached so much info on this forum:-)
Just want to let you know I'm just a guy like everyone in this forum who loves to build thing especially
quadcopter and/or UAV. So, I'm “no” expert here..:-)) All information from me may cause your QC/UAV crash without warning...oh your windows pc too.:-))
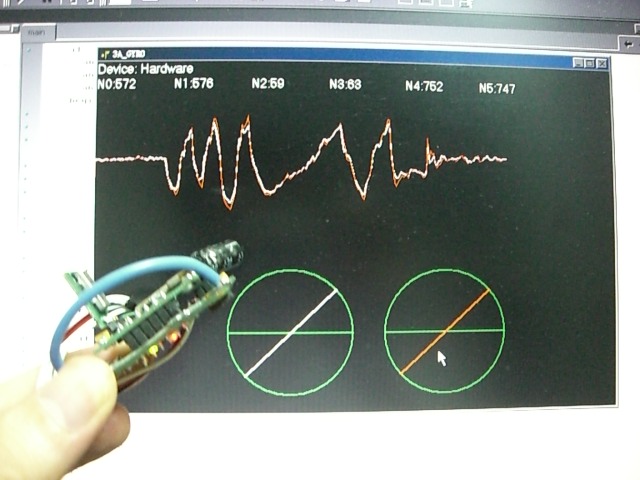
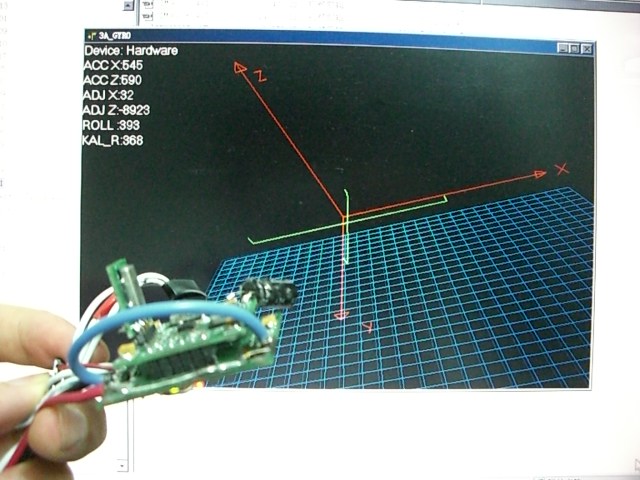
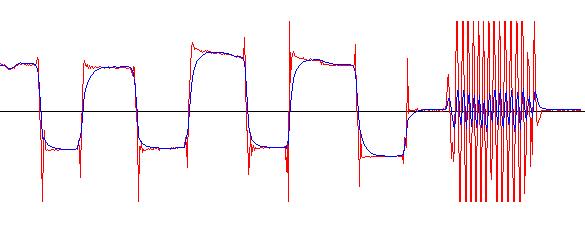
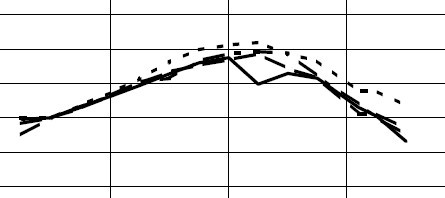
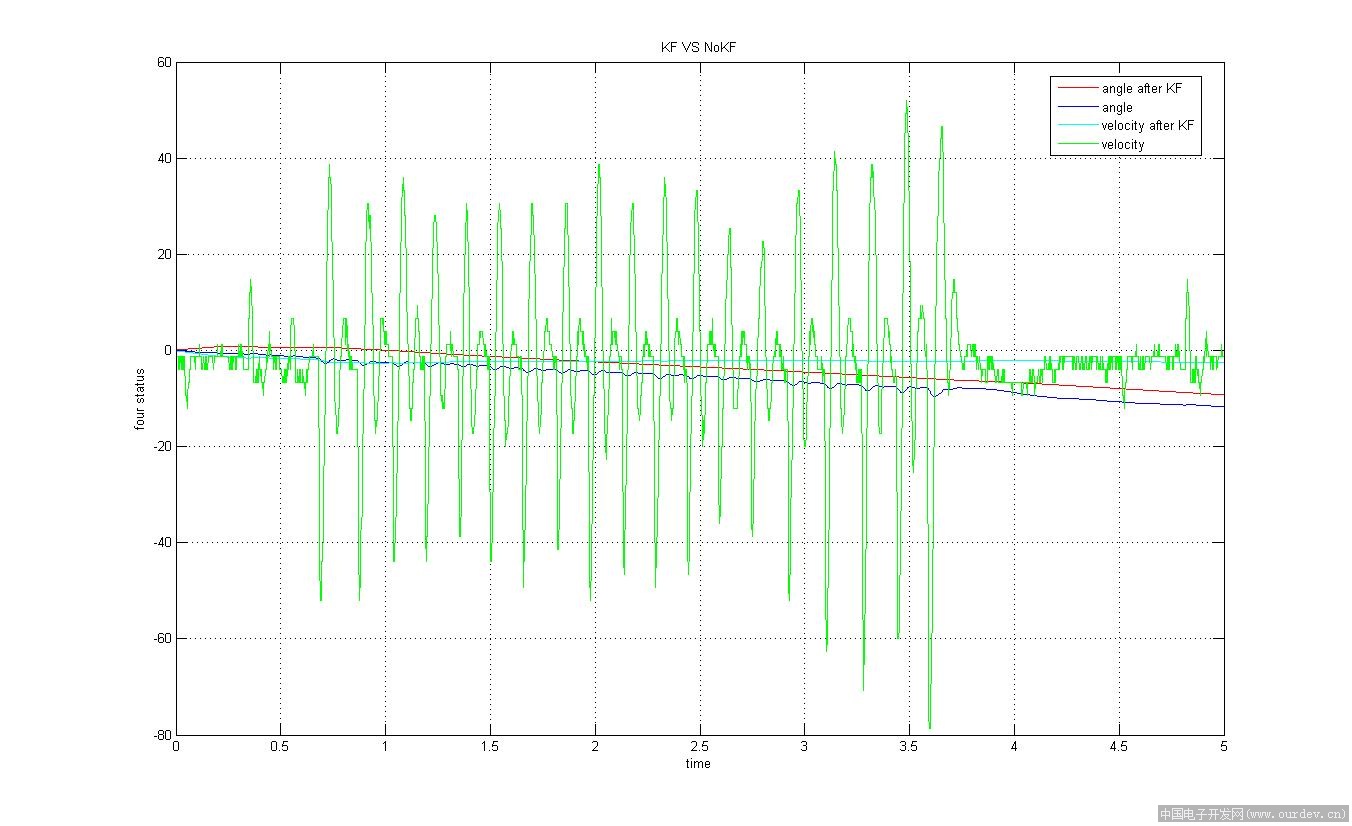
Kalman Filter, obviously just a series of algorithm that capable products a clean signal that we wants.
Your questions.
1.Kalman 得输入参数是什么?是加速度还是角速度?
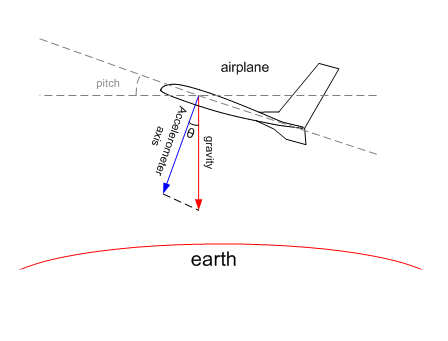
This depended on what project working on? For QC, the minimum is 2axis gyro (roll and pitch) and 3axis Accel.
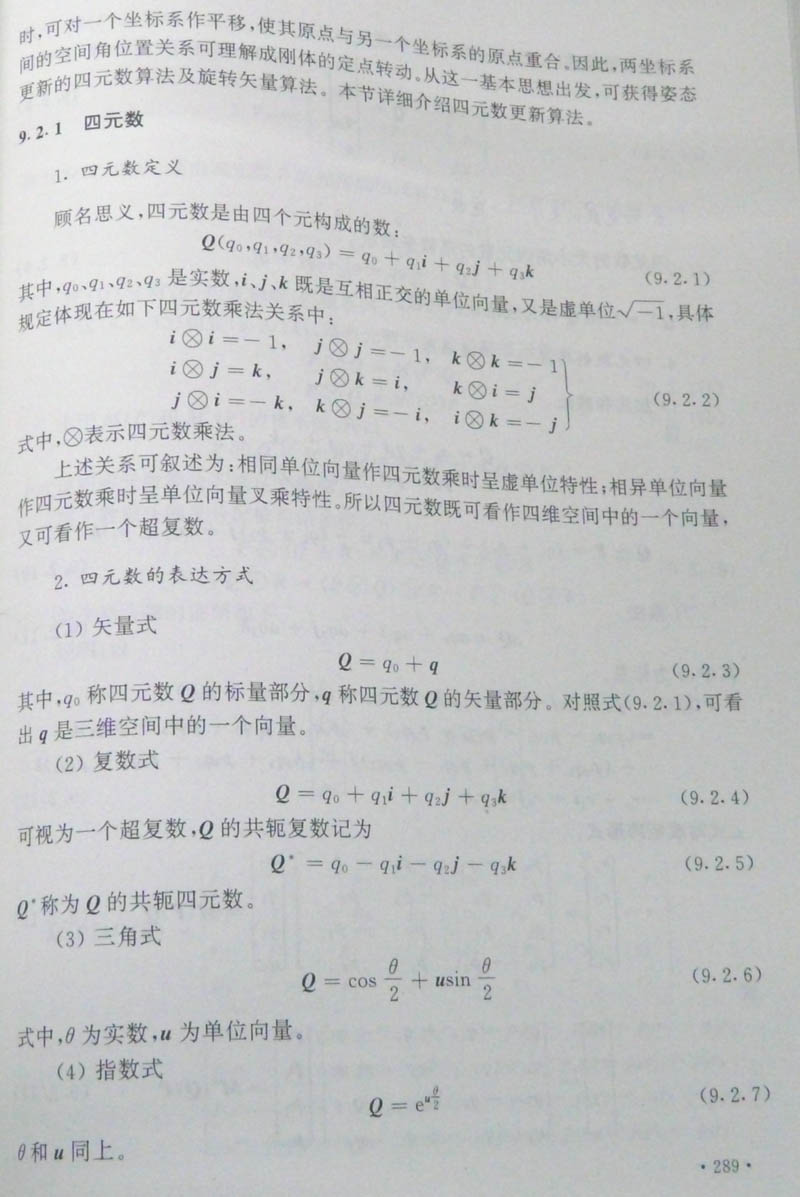
2 .还牵扯到一个“四元数法”,它得输入参数是什么?
Not 100% sure what is“ 四元数法" but i think is “matrix” “feng_matrix” should knowns about this stuff.:-)
3你能不能描述一下整个姿态角求解的流程?
OK, I try but don't laugh....
Read all data form the sensors, Put all data into the matrix
and let the KMF do it tricks (predication, update and invariants)
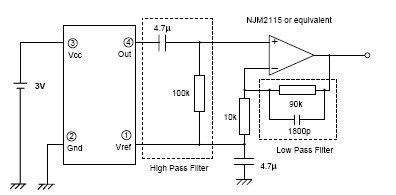
Below is some codes I have for the adxl330 Idg300 IMU.
#define SAMPLE_COUNT
// Sample data gathered directly from IMU every 1/20th of a second using 10-bit ADC // on an ATmega168. The first
// column is the rate from the gyro (degrees/sec) and the second column is the
// pitch attitude from horizontal in degrees.
float sample_data[SAMPLE_COUNT][2] =
{
{0.016088, 1.668337},
{0.016088, 1.101706},
{0.016088, 1.652305},
{-0.273488, -66.801407},
{-0.176963, -70.497551},
{-0.370013, -73.094841},
{-0.434363, -75.203239},
{-0.241313, -70.346184},
{-0.048263, -65.979752},
{0.209137, -69.918022},
{-0.016088, -2.223961},
{0.016088, -2.202598},
{0.016088, -2.202598}
};
static void matrix_multiply(float* A, float* B, int m, int p, int n, float* C)
// Matrix Multiplication Routine
{
// A = input matrix (m x p)
// B = input matrix (p x n)
// m = number of rows in A
// p = number of columns in A = number of rows in B
// n = number of columns in B
// C = output matrix = A*B (m x n)
int i, j, k;
for (i=0;i<m;i++)
for(j=0;j<n;j++)
{
C[n*i+j]=0;
for (k=0;k<p;k++)
C[n*i+j]= C[n*i+j]+A[p*i+k]*B[n*k+j];
}
}
static void matrix_addition(float* A, float* B, int m, int n, float* C)
// Matrix Addition Routine
{
// A = input matrix (m x n)
// B = input matrix (m x n)
// m = number of rows in A = number of rows in B
// n = number of columns in A = number of columns in B
// C = output matrix = A+B (m x n)
int i, j;
for (i=0;i<m;i++)
for(j=0;j<n;j++)
C[n*i+j]=A[n*i+j]+B[n*i+j];
}
static void matrix_subtraction(float* A, float* B, int m, int n, float* C)
// Matrix Subtraction Routine
{
// A = input matrix (m x n)
// B = input matrix (m x n)
// m = number of rows in A = number of rows in B
// n = number of columns in A = number of columns in B
// C = output matrix = A-B (m x n)
int i, j;
for (i=0;i<m;i++)
for(j=0;j<n;j++)
C[n*i+j]=A[n*i+j]-B[n*i+j];
}
static void matrix_transpose(float* A, int m, int n, float* C)
// Matrix Transpose Routine
{
// A = input matrix (m x n)
// m = number of rows in A
// n = number of columns in A
// C = output matrix = the transpose of A (n x m)
int i, j;
for (i=0;i<m;i++)
for(j=0;j<n;j++)
C[m*j+i]=A[n*i+j];
}
static int matrix_inversion(float* A, int n, float* AInverse)
// Matrix Inversion Routine
{
// A = input matrix (n x n)
// n = dimension of A
// AInverse = inverted matrix (n x n)
// This function inverts a matrix based on the Gauss Jordan method.
// The function returns 1 on success, 0 on failure.
int i, j, iPass, imx, icol, irow;
float det, temp, pivot, factor;
float* ac = (float*)calloc(n*n, sizeof(float));
det = 1;
for (i = 0; i < n; i++)
{
for (j = 0; j < n; j++)
{
AInverse[n*i+j] = 0;
ac[n*i+j] = A[n*i+j];
}
AInverse[n*i+i] = 1;
}
// The current pivot row is iPass.
// For each pass, first find the maximum element in the pivot column.
for (iPass = 0; iPass < n; iPass++)
{
imx = iPass;
for (irow = iPass; irow < n; irow++)
{
if (fabs(A[n*irow+iPass]) > fabs(A[n*imx+iPass])) imx = irow;
}
// Interchange the elements of row iPass and row imx in both A and AInverse.
if (imx != iPass)
{
for (icol = 0; icol < n; icol++)
{
temp = AInverse[n*iPass+icol];
AInverse[n*iPass+icol] = AInverse[n*imx+icol];
AInverse[n*imx+icol] = temp;
if (icol >= iPass)
{
temp = A[n*iPass+icol];
A[n*iPass+icol] = A[n*imx+icol];
A[n*imx+icol] = temp;
}
}
}
// The current pivot is now A[iPass][iPass].
// The determinant is the product of the pivot elements.
pivot = A[n*iPass+iPass];
det = det * pivot;
if (det == 0)
{
free(ac);
return 0;
}
for (icol = 0; icol < n; icol++)
{
// Normalize the pivot row by dividing by the pivot element.
AInverse[n*iPass+icol] = AInverse[n*iPass+icol] / pivot;
if (icol >= iPass) A[n*iPass+icol] = A[n*iPass+icol] / pivot;
}
for (irow = 0; irow < n; irow++)
{
// Add a multiple of the pivot row to each row. The multiple factor
// is chosen so that the element of A on the pivot column is 0.
if (irow != iPass) factor = A[n*irow+iPass];
for (icol = 0; icol < n; icol++)
{
if (irow != iPass)
{
AInverse[n*irow+icol] -= factor * AInverse[n*iPass+icol];
A[n*irow+icol] -= factor * A[n*iPass+icol];
}
}
}
}
free(ac);
return 1;
}
static void matrix_print(float* A, int m, int n)
// Matrix print.
{
// A = input matrix (m x n)
// m = number of rows in A
// n = number of columns in A
int i, j;
for (i=0;i<m;i++)
{
printf("| ");
for(j=0;j<n;j++)
{
printf("%7.3f ", A[n*i+j]);
}
printf("|\n");
}
}
// n states
// m inputs
// r outputs
#define n 2
#define m 1
#define r 1
float kalman_update(float gyroscope_rate, float accelerometer_angle)
{
// A is an n by n matrix
// B is an n by m matrix
// C is an r by n matrix
// Sz is an r by r matrix
// Sw is an n by n matrix
// xhat is an n by 1 vector
// P is an n by n matrix
// y is an r by 1 vector
// u is an m by 1 vector
// Constants.
static float A[n][n] = {{1.0, -0.019968}, {0.0, 1.0}};
static float B[n][m] = {{0.019968}, {0.0}};
static float C[r][n] = {{1.0, 0.0}};
static float Sz[r][r] = {{17.2}};
static float Sw[n][n] = {{0.005, 0.005}, {0.005, 0.005}};
// Persistant states.
static float xhat[n][1] = {{0.0}, {0.0}};
static float P[n][n] = {{0.005, 0.005}, {0.005, 0.005}};
// Inputs.
float u[m][m]; // Gyroscope rate.
float y[m][m]; // Accelerometer angle.
// Temp values.
float AP[n][n]; // This is the matrix A*P
float CT[n][r]; // This is the matrix C'
float APCT[n][r]; // This is the matrix A*P*C'
float CP[r][n]; // This is the matrix C*P
float CPCT[r][r]; // This is the matrix C*P*C'
float CPCTSz[r][r]; // This is the matrix C*P*C'+Sz
float CPCTSzInv[r][r]; // This is the matrix inv(C*P*C'+Sz)
float K[n][r]; // This is the Kalman gain.
float Cxhat[r][1]; // This is the vector C*xhat
float yCxhat[r][1]; // This is the vector y-C*xhat
float KyCxhat[n][1]; // This is the vector K*(y-C*xhat)
float Axhat[n][1]; // This is the vector A*xhat
float Bu[n][1]; // This is the vector B*u
float AxhatBu[n][1]; // This is the vector A*xhat+B*u
float AT[n][n]; // This is the matrix A'
float APAT[n][n]; // This is the matrix A*P*A'
float APATSw[n][n]; // This is the matrix A*P*A'+Sw
float KC[n][n]; // This is the matrix K*C
float KCP[n][n]; // This is the matrix K*C*P
float KCPAT[n][n]; // This is the matrix K*C*P*A'
// Fill in inputs.
u[0][0] = gyroscope_rate;
y[0][0] = accelerometer_angle;
#if 0
// Print various matrices.
printf("u =\n");
matrix_print((float*) u, m, m);
printf("y =\n");
matrix_print((float*) y, m, m);
printf("A =\n");
matrix_print((float*) A, n, n);
printf("B =\n");
matrix_print((float*) B, n, m);
printf("State =\n");
matrix_print((float*) xhat, n, 1);
#endif
// Update the state estimate by extrapolating estimate with gyroscope input.
// xhat_est = A * xhat + B * u
matrix_multiply((float*) A, (float*) xhat, n, n, 1, (float*) Axhat);
matrix_multiply((float*) B, (float*) u, n, r, 1, (float*) Bu);
matrix_addition((float*) Axhat, (float*) Bu, n, 1, (float*) AxhatBu);
#if 0
printf("State Estimate =\n");
matrix_print((float*) AxhatBu, n, 1);
#endif
// Compute the innovation.
// Inn = y - c * xhat;
matrix_multiply((float*) C, (float*) xhat, r, n, 1, (float*) Cxhat);
matrix_subtraction((float*) y, (float*) Cxhat, r, 1, (float*) yCxhat);
#if 0
printf("Innovation =\n");
matrix_print((float*) yCxhat, r, 1);
#endif
// Compute the covariance of the innovation.
// s = C * P * C' + Sz
matrix_transpose((float*) C, r, n, (float*) CT);
matrix_multiply((float*) C, (float*) P, r, n, n, (float*) CP);
matrix_multiply((float*) CP, (float*) CT, r, n, r, (float*) CPCT);
matrix_addition((float*) CPCT, (float*) Sz, r, r, (float*) CPCTSz);
// Compute the kalman gain matrix.
// K = A * P * C' * inv(s)
matrix_multiply((float*) A, (float*) P, n, n, n, (float*) AP);
matrix_multiply((float*) AP, (float*) CT, n, n, r, (float*) APCT);
matrix_inversion((float*) CPCTSz, r, (float*) CPCTSzInv);
matrix_multiply((float*) APCT, (float*) CPCTSzInv, n, r, r, (float*) K);
// Update the state estimate.
// xhat = xhat_est + K * Inn;
matrix_multiply((float*) K, (float*) yCxhat, n, r, 1, (float*) KyCxhat);
matrix_addition((float*) AxhatBu, (float*) KyCxhat, n, 1, (float*) xhat);
// Compute the new covariance of the estimation error.
// P = A * P * A' - K * C * P * A' + Sw
matrix_transpose((float*) A, n, n, (float*) AT);
matrix_multiply((float*) AP, (float*) AT, n, n, n, (float*) APAT);
matrix_addition((float*) APAT, (float*) Sw, n, n, (float*) APATSw);
matrix_multiply((float*) K, (float*) C, n, r, n, (float*) KC);
matrix_multiply((float*) KC, (float*) P, n, n, n, (float*) KCP);
matrix_multiply((float*) KCP, (float*) AT, n, n, n, (float*) KCPAT);
matrix_subtraction((float*) APATSw, (float*) KCPAT, n, n, (float*) P);
// Return the estimate.
return xhat[0][0];
}
int main(int argc, char **argv)
{
int i;
float gyro_input;
float accel_input;
float kalman_output;
for (i = 0; i < SAMPLE_COUNT; ++i)
{
// Get the gyro and accelerometer input.
gyro_input = sample_data[0];
accel_input = sample_data[1];
// Update the Kalman filter and get the output.
kalman_output = kalman_update(gyro_input, accel_input);
// Print out input data and the kalman output.
printf("%d gyro=%7.3f deg/sec accel=%7.3f degrees kalman_output=%5.1f degrees\n", i, gyro_input, accel_input, kalman_output);
}
return 0;
}
Get the headache yet? |
|









 楼主
楼主