|
|
 发表于 2010-9-11 23:53:07
|
显示全部楼层
发表于 2010-9-11 23:53:07
|
显示全部楼层
[2010-9-11-23-43]自平衡小车Codeourdev_582247LOC5S7.txt(文件大小:8K) (原文件名:[2010-9-11-23-43]自平衡小车Code.txt)
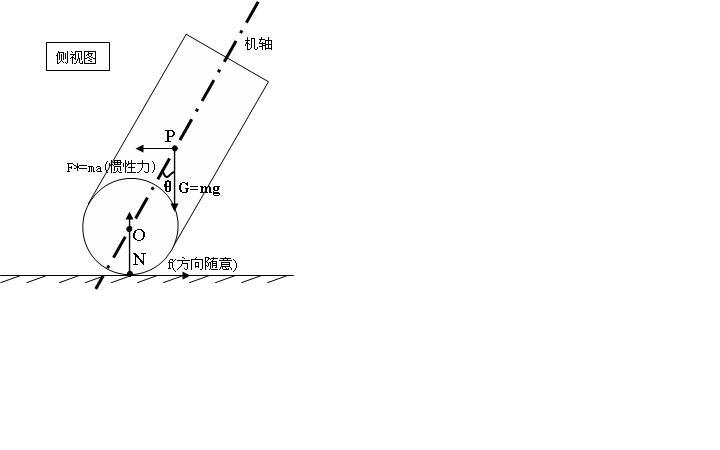
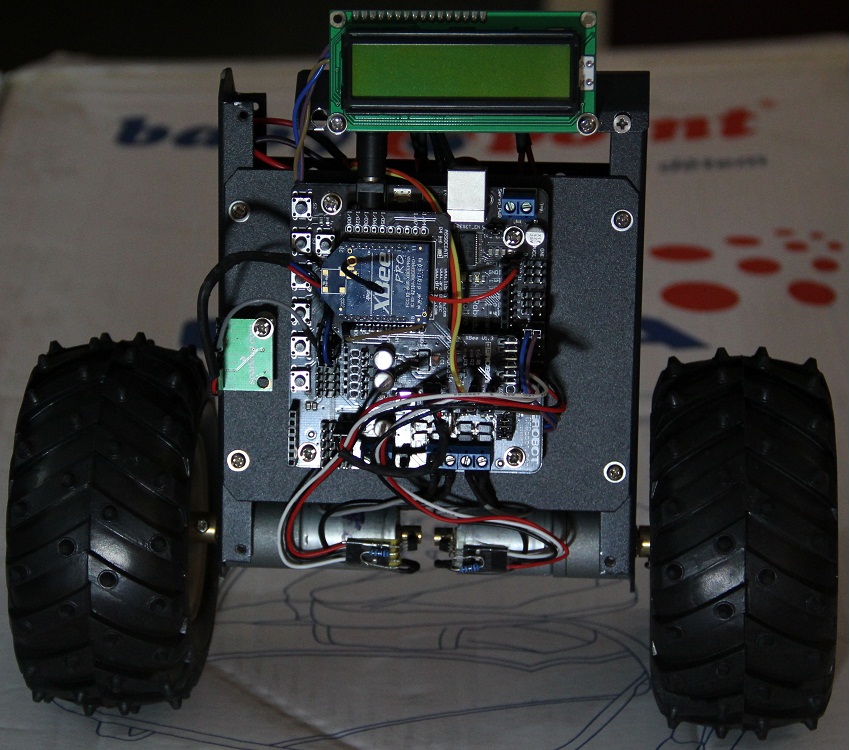
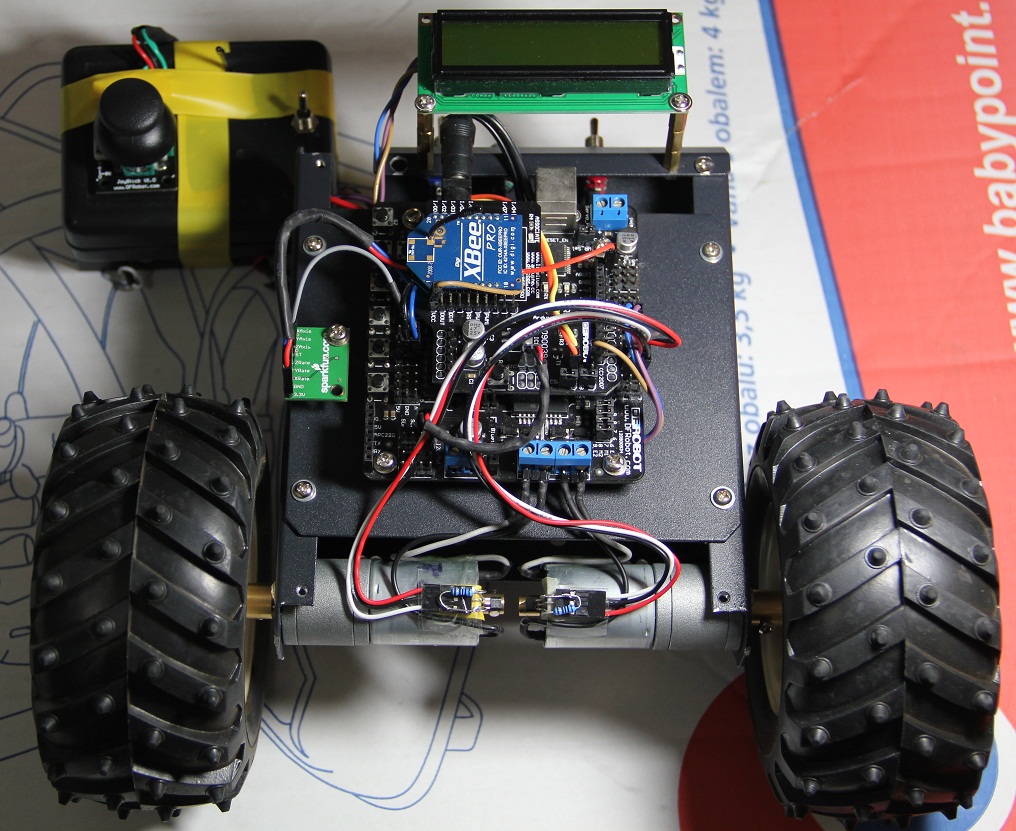
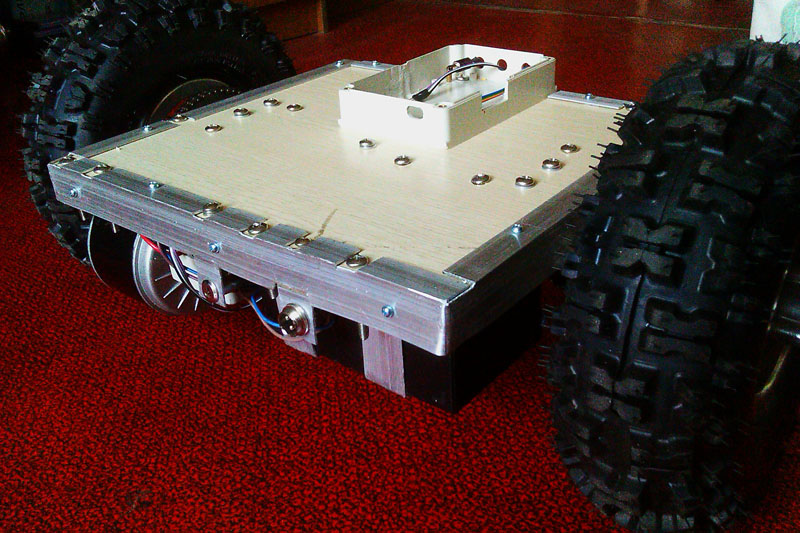
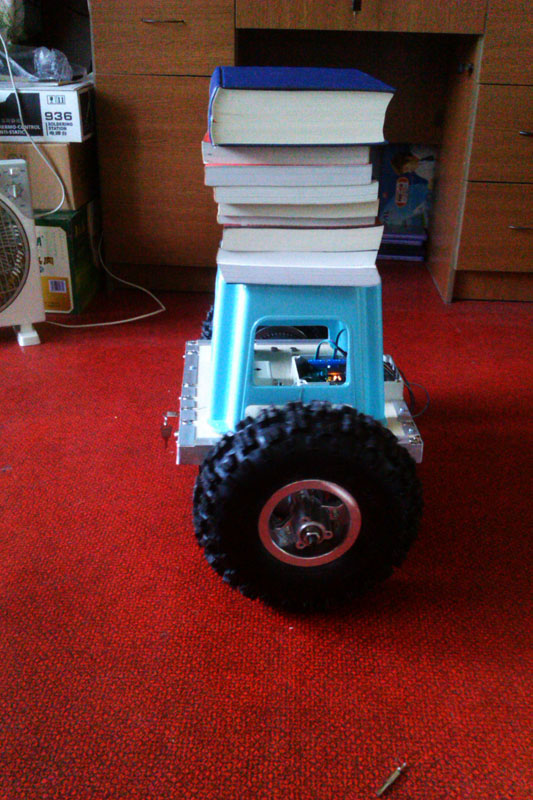
这是我的自平衡小车的完整代码,单片机是arduino 168.
代码同时也贴在这里:
static const double SEMICIRCLE_ARC = 57.29578; /*半圆对应的弧度值*/
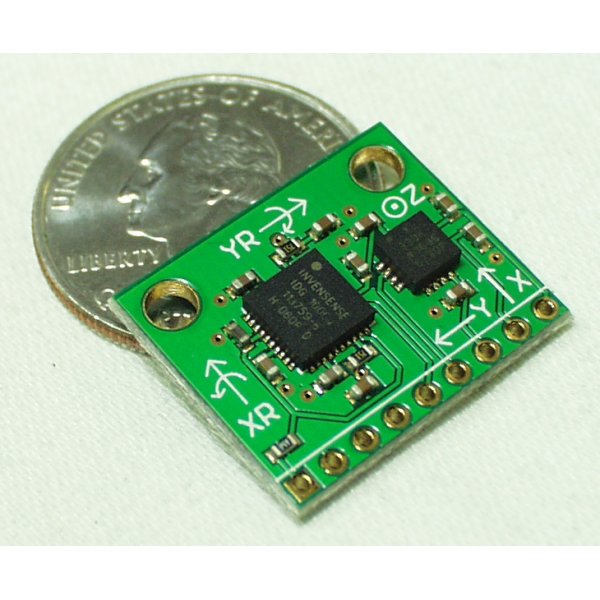
static const double GYRO_OPERATOR = 0.028123; /*AD读取的陀螺仪数值对应的弧度算子,IDG330 Mannual, 2mv= 1度/s 的角速率,ad读数1024,3.3v,那么每读数对应 3.223mV,所以每读数对应3.223/2/180*PI= 0.028123弧度/秒
*/
/*kalman*/
static const double C_0 = 1;
static const double Q_angle=0.001, Q_gyro=0.003, R_angle=0.5, dt=0.005;//注意:dt的取值为kalman滤波器采样时间
double P[2][2] = {{ 1, 0 },
{ 0, 1 }};
double Pdot[4] ={ 0,0,0,0};
double q_bias, angle_err, PCt_0, PCt_1, E, K_0, K_1, t_0, t_1;
double angle, angle_dot;
/*sensor*/
double sensorPort[6] = { 0, 1, 2, 3, 4, 5};/*传感器地址,电路决定.accZ,gyroX, AD1, AD2, AD3, AD4*/
double sensorValue[6];/*传感器的返回值*/
/*传感器零点 0:Z轴(平行轴) 1:陀螺仪中点*/
double sensorZero[2] = {499,505};
double sensorAdjusted[2];/*传感器的返回值重整*/
//double provAngle;
/*moto*/
int E1 = 6;
int E2 = 9;
int M1 = 7;
int M2 = 8;
double deadAreaCompensation1 = 45,deadAreaCompensation2 = 35;
/*balance*/
double RATE[4] = { 0,0,0,0};/*公式中的4个变量*/
double K[4] = { 60.45, 1.27, 125, 0.75};/*公式中的4个常量*/
double K_AD[4] = { 1, 1, 1, 1};/*公式中的4个常量*/
double wheel_ls[7];/*左轮:0:编码器 1:位移(position) 2:position_dot 3:position_dot_filter 4:speedNeed 5:turnNeed 6:speedOutPut */
double wheel_rs[7];/*右轮:0:编码器 1:位移(position) 2:position_dot 3:position_dot_filter 4:speedNeed 5:turnNeed 6:speedOutPut */
double Torque;/*扭矩*/
unsigned int count,count2;
boolean OK=false;//这个是误差达到一定程度后的系统关闭开关.
int bf,X,Y;//从无线端发来的命令
/*kalman*/
/*angle_m:经过atan2(ax,ay)方法计算的偏角,弧度值
gyro_m:经过初步减去零点的陀螺仪角速度值,弧度值
*/
void Kalman_Filter(double angle_m,double gyro_m)
{
angle+=(gyro_m-q_bias) * dt;
angle_err = angle_m - angle;
Pdot[0]=Q_angle - P[0][1] - P[1][0];
Pdot[1]=- P[1][1];
Pdot[2]=- P[1][1];
Pdot[3]=Q_gyro;
P[0][0] += Pdot[0] * dt;
P[0][1] += Pdot[1] * dt;
P[1][0] += Pdot[2] * dt;
P[1][1] += Pdot[3] * dt;
PCt_0 = C_0 * P[0][0];
PCt_1 = C_0 * P[1][0];
E = R_angle + C_0 * PCt_0;
K_0 = PCt_0 / E;
K_1 = PCt_1 / E;
t_0 = PCt_0;
t_1 = C_0 * P[0][1];
P[0][0] -= K_0 * t_0;
P[0][1] -= K_0 * t_1;
P[1][0] -= K_1 * t_0;
P[1][1] -= K_1 * t_1;
angle += K_0 * angle_err;
q_bias += K_1 * angle_err;
angle_dot = gyro_m-q_bias;//也许应该用last_angle-angle
}
void do_balance() {
while(Serial.available() > 0){//遥控器比例控制,X和Y各16个值,整合成一个BYTE.这样最简单,一个字节就能控制了.
bf = Serial.read();
}
if(bf!=-1){//计算命令速度
Y = bf/16;//bf最大255
X = bf%16;//
}
wheel_ls[4] = (8>X)?1:(8==X?0:-1);//前进后退
wheel_rs[4] = (8>X)?1:(8==X?0:-1);
wheel_ls[5] = (8-Y)*16;//转弯
wheel_rs[5] = (Y-8)*16;
sensorValue[0] = analogRead(sensorPort[0]);//加速度:水平方向
sensorValue[1] = analogRead(sensorPort[1]);//旋转(陀螺)
sensorValue[2] = analogRead(sensorPort[2]);//旋钮1
sensorValue[3] = analogRead(sensorPort[3]);//旋钮2
sensorValue[4] = analogRead(sensorPort[4]);//旋钮3
sensorValue[5] = analogRead(sensorPort[5]);//旋钮4
//算出整理过的零点值
sensorAdjusted[0] = sensorValue[0] - sensorZero[0];//水平方向的加速度值
if(abs(sensorAdjusted[0]) > 70)//如果倾斜到一定程度,就停机
{
OK = false;
sensorAdjusted[0] =sensorAdjusted[0]>0?70:-70;
}
sensorAdjusted[1] = sensorZero[1] - sensorValue[1];/*陀螺仪读出的角速度值,减去初始零点*/
/*根据可变电阻改变K的倍数*/
//deadAreaCompensation = (sensorValue[4]+1)/10.24;
//K_AD[0] = (sensorValue[2]+1)/256;//102.4;/*值在0.001~10之间变化.在AD=100的时候接近1 */
//K_AD[1] = (sensorValue[3]+1)/256;//102.4;
//K_AD[2] = (sensorValue[4]+1)/256;//102.4;
//K_AD[3] = (sensorValue[5]+1)/256;//102.4;
/*根据上一周期Torqu的值统计轮子转动积分*/
wheel_ls[2] = Torque > 0?wheel_ls[0]:-wheel_ls[0];
wheel_rs[2] = Torque > 0?wheel_rs[0]:-wheel_rs[0];
wheel_ls[0] = wheel_rs[0] = 0;
/*************** balance *********************************************/
/*小车初始状态*/
{
if(!OK)
{
if(abs(sensorAdjusted[0]) <= 3)//将小车竖立起来时就启动
{
count=0;
OK = true;
}
for(int i = 0; i <7;i++)//不启动的时候,所有积分值都清零
{
wheel_ls = 0;
wheel_rs = 0;
}
}
}
/*balance*/
{
/*GYRO_OPERATOR = 0.028123 AD读取的陀螺仪数值对应的弧度算子*/
Kalman_Filter(atan2(sensorAdjusted[0], sqrt(6400-sensorAdjusted[0]*sensorAdjusted[0])), sensorAdjusted[1] * GYRO_OPERATOR);//6400:因为只有一轴加速度计,所以虚拟一个斜边.这可能是小车晃动的原因之一
RATE[0] = angle * SEMICIRCLE_ARC;//SEMICIRCLE_ARC=57.29578; /*半圆对应的弧度值*/
RATE[1] = angle_dot * SEMICIRCLE_ARC;
//RATE[1] = RATE[0] - provAngle;
//provAngle = RATE[0];
}
/*计算速度 double wheel_ls[8]; 0:编码器累加 1:位移(position) 2:position_dot 3:速度(position_dot_filter) 4:speedNeed 5:turnNeed 6:speedOutPut
*/
{
wheel_ls[3] *= 0.95; /*车轮速度滤波,wheel_ls[3] : position_dot_filter*/
wheel_ls[3] += wheel_ls[2]*0.05; /*wheel_ls[2] : position_dot*/
wheel_ls[1] += wheel_ls[3]; /*wheel_ls[1] : position*/
wheel_ls[1] += wheel_ls[4]; /*wheel_ls[4] : speedNeed*/
wheel_ls[1] = max(-50, wheel_ls[1]);
wheel_ls[1] = min(50, wheel_ls[1]);
/*
wheel_rs[3] *= 0.85;
wheel_rs[3] += wheel_rs[2]*0.15;
wheel_rs[1] += wheel_rs[3];
wheel_rs[1] += wheel_rs[5];
wheel_rs[1] = max(-50, wheel_rs[1]);
wheel_rs[1] = min(50, wheel_rs[1]);
*/
RATE[2] = wheel_ls[3];//速度--滤波过了
RATE[3] = wheel_ls[1];//位置
}
/*Torque 综合所有参数算出扭矩*/
{
Torque = (RATE[0]+(8-X)) * K[0] * K_AD[0] + RATE[1] * K[1] * K_AD[1] + RATE[2] * K[2] * K_AD[2] + RATE[3] * K[3]* K_AD[3];
//根据扭矩算轮子的命令值
wheel_ls[6] = abs(Torque+wheel_ls[5]) + deadAreaCompensation1;//wheel_ls[6]:扭矩输出 wheel_ls[5]:Turn_Need deadAreaCompensation1:左轮的死区补偿
wheel_ls[6] = min(255, wheel_ls[6]);//限制最大扭矩255
wheel_ls[6] = OK?wheel_ls[6]:0;//当机体倾斜角大于60度的时候停止
wheel_rs[6] = abs(Torque+wheel_rs[5]) + deadAreaCompensation2;
wheel_rs[6] = min(255, wheel_rs[6]);
wheel_rs[6] = OK?wheel_rs[6]:0;
}
if(Torque > 0)
{
digitalWrite(M2, HIGH);
digitalWrite(M1, LOW);
}
else
{
digitalWrite(M2, LOW);
digitalWrite(M1, HIGH);
}
analogWrite(E1, wheel_ls[6]); //PWM调速a==0-255
analogWrite(E2, wheel_rs[6]);
}
void do_msg(){
if(count%100==0)//0.5秒刷新显示屏
{
Serial.print("$CLEAR\r\n");
Serial.print("$GO 1 1\r\n");
Serial.print("$PRINT ");
Serial.print(wheel_ls[1]);
Serial.print(" ");
Serial.print(wheel_ls[3]);
Serial.print("\r\n");
Serial.print("$GO 2 1\r\n");
Serial.print("$PRINT ");
Serial.print(wheel_ls[5]);
Serial.print(" ");
Serial.print(wheel_rs[5]);
Serial.print("\r\n");
}
}
/***************** setup-loop *************************************************/
void setup() {
count=0;
X=Y=8;
bf=-1;
//init motos
for (int i = 6; i <= 9; i++) {
pinMode(i, OUTPUT);
}
Serial.begin(9600);//115200);
analogReference(EXTERNAL); //设置模拟输入为外部参考3.3V
attachInterrupt(0, blinkone, CHANGE); //设置为0号中断,中断函数blink,触发方式为CHANGE
attachInterrupt(1, blinktwo, CHANGE); //设置为0号中断,中断函数blink,触发方式为CHANGE
}
void blinkone()//中断函数
{
wheel_ls[0] ++;
}
void blinktwo()//中断函数
{
wheel_rs[0] ++;
}
void loop() {
do_balance();//计算平衡
do_msg();
delay(3);
count++;
if(count>=60000)
count=0;
} |
|
 [复制链接]
[复制链接]






 楼主
楼主